Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is the robot dog Jamoca, and what problem does it solve?
Jamoca is a four-legged mobile robot developed by Tencent Robotics X Lab, announced in November 2020. The robot was designed to demonstrate advanced mobility capabilities in complex terrain environments, particularly for navigating challenging surfaces that test perception, planning, and control systems in quadruped locomotion research.
Q2. What are the main capabilities and key features of Jamoca?
According to Tencent Robotics X, Jamoca can walk, run, trot diagonally, and jump similar to a biological dog. The robot is engineered to navigate irregular terrain with small foot-spacing and high-altitude obstacles. It demonstrates capabilities in terrain understanding, precise footing selection, and steady movement across complex surfaces.
Q3. Who is Jamoca built for, and which industries benefit from it?
Jamoca was developed as a research platform by Tencent Robotics X Lab to advance quadruped robot technology. The lab focuses on mobility, dexterous operation, and intelligent agent research. While primarily a research prototype, the underlying technologies target applications in inspection, navigation, and autonomous systems development.
Q4. Is Jamoca a commercial product or a research prototype?
Jamoca is a research platform developed by Tencent Robotics X Lab rather than a commercial product. The robot serves as a testbed for advancing quadruped mobility research and demonstrating technological capabilities in challenging terrain navigation scenarios.
Q5. Is Jamoca currently available for purchase?
Jamoca is not available for commercial purchase. The robot remains a research platform operated by Tencent Robotics X Lab for internal development and demonstration purposes rather than a consumer or enterprise product offering.
Q6. How does Jamoca perform in real-world environments and rough terrain?
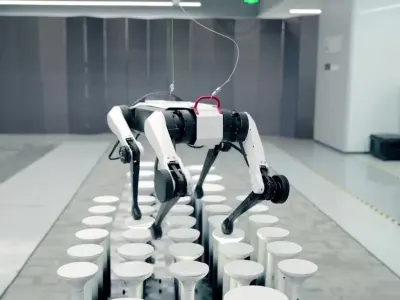
Jamoca demonstrated performance on quincuncial piles, a traditional Chinese obstacle consisting of irregularly-spaced cylinders. The robot successfully navigated this terrain while also climbing a steep inclined step, showcasing its ability to handle complex spatial arrangements and varying surface heights.
Q7. When was Jamoca announced or officially launched?
Tencent Robotics X Lab announced Jamoca in November 2020. The announcement included demonstrations of the robot walking on quincuncial piles, a challenging terrain configuration used to evaluate quadruped mobility and perception capabilities.
Q8. How does Jamoca compare to other quadruped robot dogs?
According to Tencent researchers, Jamoca was the first quadruped robot globally to challenge walking in smaller foot-space configurations and at higher altitudes compared to other quadruped robots at the time of its announcement. The robot's design emphasizes perception and control capabilities for complex terrain navigation.
Q9. Does Jamoca support third-party software development or SDKs?
Available search results do not provide information regarding software development kits, APIs, or third-party development support for Jamoca. The robot appears to be operated primarily as an internal research platform by Tencent Robotics X Lab.
Q10. What is the future roadmap or planned upgrades for Jamoca?
Available search results do not specify future development plans or upgrades for Jamoca. Tencent Robotics X Lab has continued advancing quadruped technology through subsequent platforms, including the multimodal robot Max announced in 2021, which incorporates leg and wheel hybrid locomotion.