
Mini Cheetah
by MIT
Released: 2018
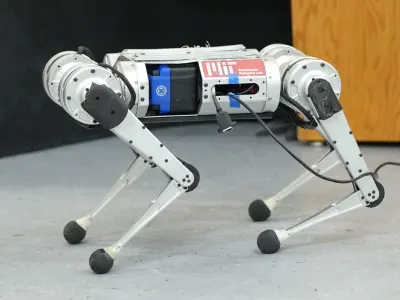
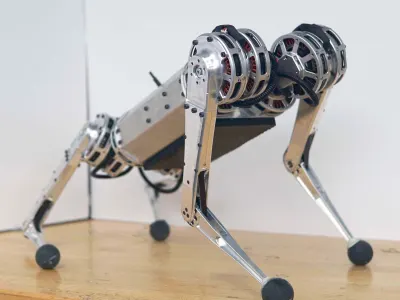
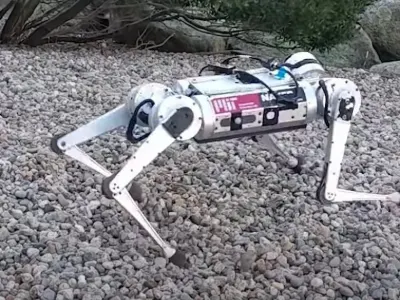
The Mini Cheetah is a compact quadrupedal robot developed by MIT researchers, designed for dynamic locomotion and acrobatic maneuvers. Measuring 48 cm in length, 30 cm in height, and 27 cm in width, it weighs approximately 9 kg. Each of its four legs features three identical high-torque, low-inertia motor modules, providing 3 degrees of freedom per leg and 12 actuated degrees of freedom total, plus 6 non-actuated for a total of 18 DOF. It integrates a Vectornav VN-100 IMU, hall-effect encoders, and an onboard UP Board with quad-core Intel Atom processor running Linux for real-time control. The robot excels in high-speed trotting up to 8.7 mph (3.84 m/s) on uneven terrain, performs backflips and other gymnastic feats, supports omnidirectional gaits like pronking, bounding, and pacing, and can turn in place at 5 rad/s. Its modular, backdrivable actuators with 6:1 gear reduction enable resilience to high-impact falls and rapid force changes for jumping and agile movements. Primarily targeted at robotics research, it demonstrates advanced control for locomotion, recovery, and learning-based adaptation.
Full Specifications
Other Notable Features
self-righting capability, survives high-impact falls, modular design for repairs, omnidirectional movement, in-place turning at 5 rad/s
Image Gallery
Below images are from MIT's official sources




Review Videos
Watch expert reviews and demonstrations of this robot dog
Frequently Asked Questions
Get answers to common questions about this robot