Early Concepts (1898-1976)
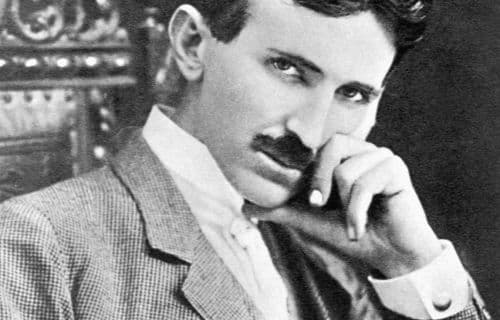
Nikola Tesla demonstrated a radio-controlled boat at Madison Square Garden, showcasing early remote control technology.
Tesla's radio-controlled boat proved practical wireless teleoperation, inspiring later remote vehicles and early robotic control concepts.
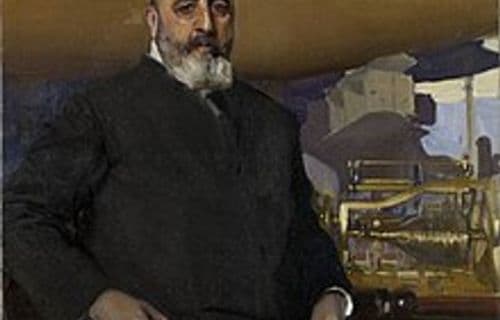
Leonardo Torres Quevedo presented the Telekino, a pioneering radio-based control system for unmanned vehicles.
Telekino allowed operators to send coded commands over radio; it's one of the first practical demonstrations of remote command for machines.
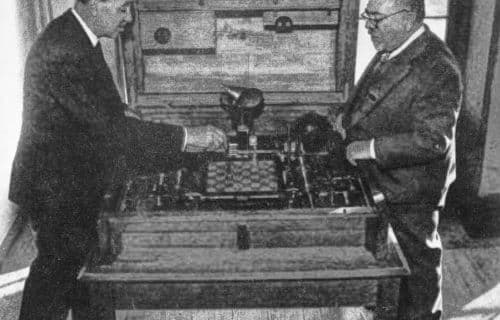
Leonardo Torres Quevedo built El Ajedrecista, the first autonomous chess-playing machine, marking an early step toward robotic intelligence.
El Ajedrecista could play an endgame position without human input, demonstrating embedded logic and automatic decision-making.

Torres Quevedo published seminal work on automatic control systems, laying the theoretical foundation for later robotics.
His publications formalized control ideas and teleoperation techniques used by later automated systems and industrial controllers.
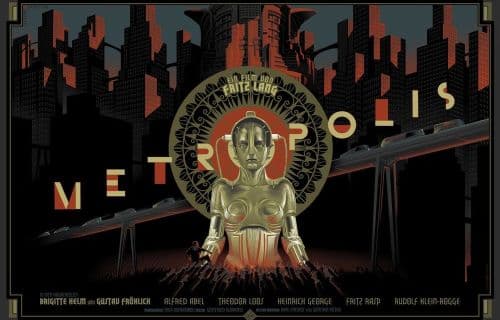
Fritz Lang's film Metropolis premiered - introducing the Maschinenmensch, one of the earliest cinematic portrayals of a humanoid robot.
The Maschinenmensch popularized the humanoid robot concept and influenced cultural views of robots for decades.

Alan Turing published influential ideas on machine intelligence, ideas that would later inspire robotic AI research.
Turing's theoretical work on computation and intelligence provided a conceptual basis for later AI used in robotics.

Engineers developed a programmable paint-spraying mechanism, an early precursor to the robotic arms later used in industry.
This mechanism showed how repeatable automated tooling could improve speed and quality in manufacturing processes.
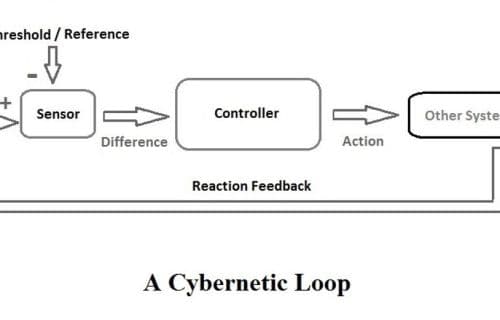
The concept of cybernetics was introduced, revolutionizing the design and control of autonomous systems.
Cybernetics emphasized feedback and control loops, concepts that are central to robot sensing and behavior.

George Devol patented a magnetic recording-based playback device to control machines, a key step toward industrial automation.
Devol's ideas led to programmable automation; his patents directly contributed to the creation of the first industrial robots.

The UNIVAC computer was unveiled, providing the digital control technology that would soon be integral to robotics.
Large-scale digital computers like UNIVAC enabled complex numerical control and the algorithms used in robotic control.

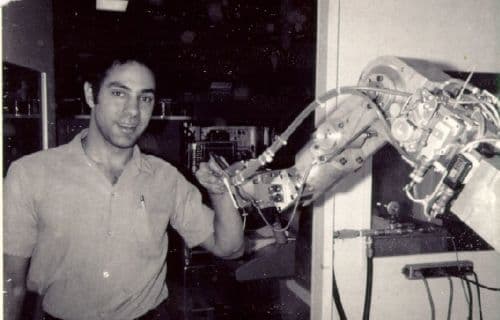
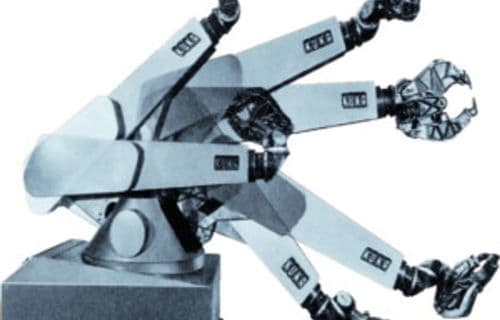
Raymond Goertz designed the first teleoperated robotic arm for handling hazardous nuclear materials.
Goertz's arm allowed remote manipulation in dangerous environments and became a foundation for modern teleoperation systems.

George Devol's ideas culminated in the concept of a programmable robot arm - the precursor to the Unimate.
The programmable arm concept enabled flexible automation - machines could be reprogrammed for different tasks on production lines.

General Motors began researching robotic automation, sparking interest in applying robots to manufacturing.
Automotive industry investment drove practical robot development, accelerating adoption of industrial manipulators.

Stanford University developed one of the first computer-controlled robotic arms for potential medical and industrial applications.
The Stanford Arm demonstrated precise computer control of articulated mechanisms, influencing research on robot kinematics.

Carnegie Mellon University established a dedicated robotics institute to advance research in automation and intelligent machines.
CMU's institute centralized robotics expertise, fostering interdisciplinary work in sensing, planning, and control.

SRI International initiated the Shakey project - the first mobile robot capable of reasoning about its actions.
Shakey combined perception, planning, and action; it used cameras and simple planners to navigate and solve tasks.

Shakey the Robot demonstrated autonomous navigation and decision-making in a controlled environment.
Shakey's demonstrations validated integrated autonomous behaviors and influenced later mobile robotics research.

Prototypes of robot-assisted surgical devices were developed, hinting at future applications in medicine.
Early surgical robots focused on precision and teleoperation, foreshadowing minimally invasive robotic surgery techniques.
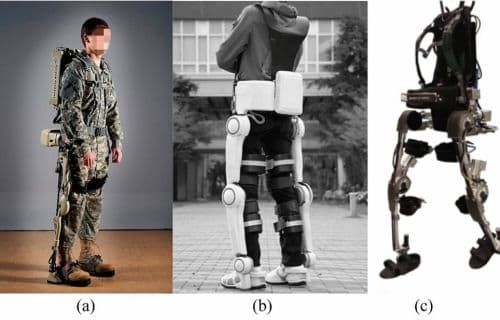
Researchers began testing active exoskeleton prototypes to enhance human strength in industrial and military settings.
Exoskeleton work explored human-machine augmentation for lifting and endurance tasks, informing safety and ergonomics research.

The Robotics Industries Association was founded to promote safety standards and collaborative research in the field.
RIA helped define industrial safety practices and standards, supporting safe integration of robots into factories.
Industrial Revolution (1976-2007)
Victor Scheinman designed the PUMA - a programmable universal manipulation arm that transformed industrial assembly processes.
PUMA provided improved precision and repeatability for manufacturing and became a common research platform.
KUKA introduced FAMULUS, the first industrial robot with six electromechanically driven axes, revolutionizing factory automation.
Six-axis manipulators increased flexibility in manufacturing tasks, enabling complex orientations and assembly operations.
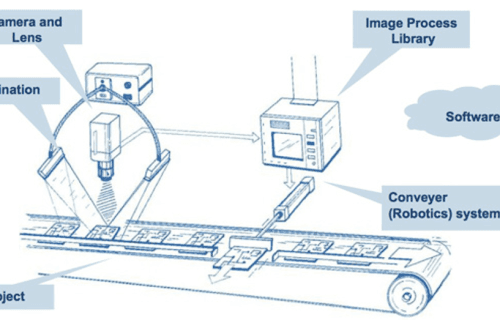
Robotic vision systems were integrated into industrial robots, enhancing precision and task repeatability.
Machine vision allowed robots to locate parts and adapt to variability, improving quality control in factories.
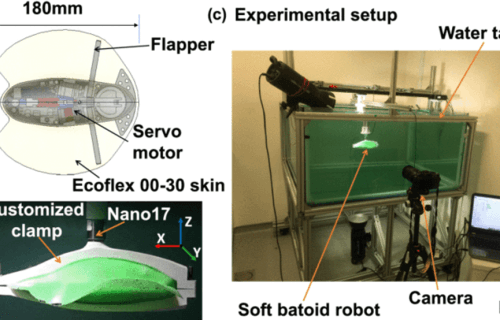
Researchers pioneered "soft robotics" concepts to enable robots to handle delicate tasks without damage.
Soft robotics introduced compliant materials and actuators for safer interaction with fragile objects and humans.
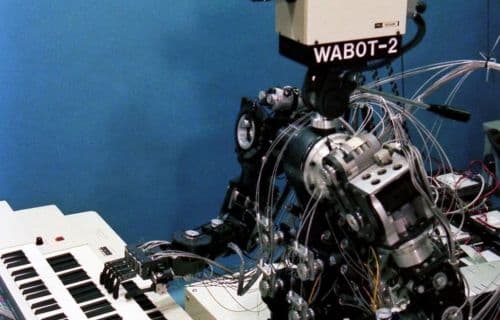
WABOT-2 was developed in Japan - a humanoid robot capable of playing musical instruments and interacting with humans.
WABOT demonstrated advanced motor control for the era and highlighted human-robot interaction research directions.

Early prototypes of robotic surgical systems were developed, laying the groundwork for minimally invasive procedures.
These prototypes prioritized precision and remote control; later systems expanded capabilities for surgeon assistance.
Advances in microprocessor technology allowed more sophisticated control algorithms for robotics.
Smaller, faster processors enabled real-time control, complex kinematics, and onboard sensing in robot platforms.
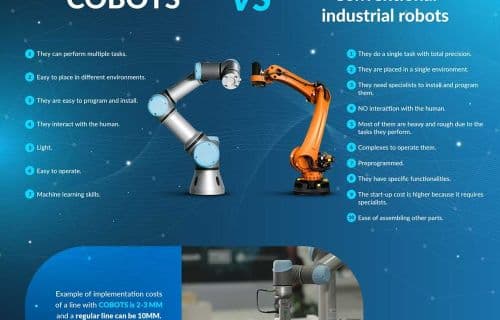
The concept of collaborative robots (cobots) was introduced, envisioning machines designed to work safely alongside human operators.
Cobots emphasize safety, ease-of-programming, and direct cooperation between humans and robots on shared tasks.
Research in adaptive machine learning for robotics accelerated at leading universities, leading to smarter automated systems.
Adaptive algorithms allowed robots to improve performance over time and handle variability in real environments.
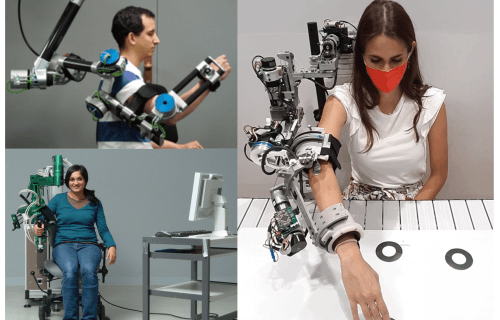
Prototypes of robotic exoskeletons for rehabilitation were successfully tested, improving mobility for patients.
Clinical exoskeletons demonstrated potential for gait rehabilitation and assistive mobility in healthcare.

Honda unveiled ASIMO, its advanced humanoid robot capable of bipedal locomotion and complex interactions.
ASIMO combined walking, perception, and interaction features; it became a high-profile demonstration of humanoid robotics.

Remotely operated surgical systems were deployed in hospitals, revolutionizing the practice of robotic surgery.
Commercial robotic surgery platforms allowed greater precision, smaller incisions, and expanded surgical capabilities.
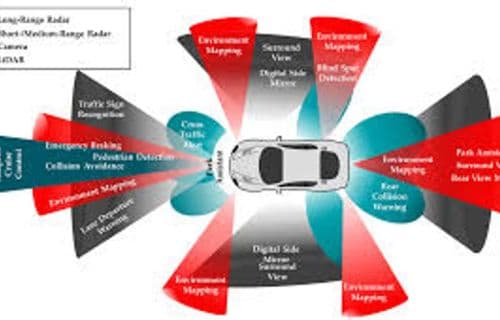
Self-driving car prototypes emerged using sensor fusion and machine vision, laying early groundwork for autonomous vehicles.
These prototypes integrated lidar, cameras, and GPS to perceive environments and plan safe trajectories.
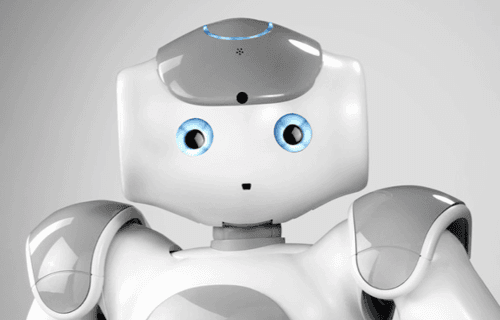
Aldebaran Robotics launched NAO, a programmable humanoid robot widely used in education and research.
NAO provided an accessible platform for researchers and students to experiment with robotics and HRI (human-robot interaction).
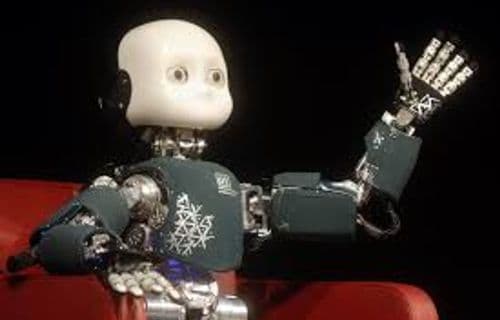
The Italian Institute of Technology launched iCub, a child-sized humanoid platform for cognitive and motor skills research.
iCub was designed to study embodied cognition, learning, and sensorimotor development in robots.
Digital Age (2007-2018)
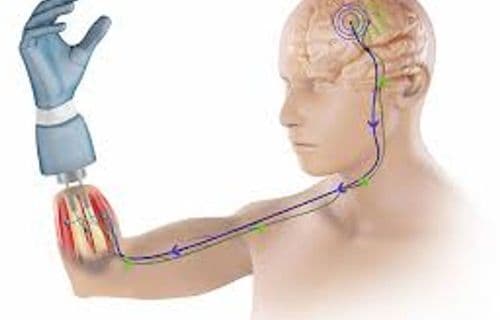
Robotic prosthetic limbs integrated with neural interfaces began restoring natural movement to amputees.
Advances in sensors and neural decoding enabled more natural control of prosthetics, improving patient outcomes.

Boston Dynamics released footage of BigDog - a quadruped robot capable of navigating rough terrain and recovering balance after impacts.
BigDog showed dynamic locomotion and balance control, influencing research in legged robots for uneven terrain.

NAIST introduced HRP-4C, a humanoid robot capable of realistic movement, singing, and dancing.
HRP-4C emphasized lifelike motion and expression, advancing research in social robotics and entertainment uses.

The first generation of humanoid space robots was developed to assist astronauts in extra-vehicular activities.
Space humanoid robots were designed to work in microgravity, performing tasks too risky or time-consuming for crew.

NASA launched Robonaut 2 to the International Space Station, marking a milestone in space robotics.
Robonaut 2 demonstrated dexterous manipulation in space and autonomous assistance for astronauts.

Advanced robotic systems were integrated into high-speed manufacturing assembly lines, dramatically boosting productivity.
Integration of robots with vision and conveyors optimized throughput and reduced human exposure to repetitive tasks.

Boston Dynamics introduced Atlas, a highly agile humanoid robot designed for dynamic tasks and search-and-rescue operations.
Atlas showcased advanced balance, whole-body control, and mobility useful for disaster response scenarios.

JAXA launched Kirobo, the first robot astronaut, to the International Space Station for experimental missions.
Kirobo tested dialogue and social interaction in space, investigating human-robot communication in isolated environments.

PAL Robotics launched REEM-C, a research platform advancing human-robot interaction and autonomous navigation.
REEM-C supported research in navigation, perception, and service robotics with an adaptable humanoid platform.

SoftBank Robotics launched Pepper, a humanoid robot designed for customer interaction and emotion recognition.
Pepper focused on social cues and natural language, used widely in retail and educational deployments.

RIKEN introduced Robear, a nursing robot designed to safely lift and assist elderly patients.
Robear's design prioritized gentle handling and human-safe actuation for elderly care scenarios.

Hanson Robotics introduced Sophia, a humanoid robot renowned for its advanced conversation skills and lifelike facial expressions.
Sophia combined chatbot systems with expressive facial mechanics to explore social AI and ethics in robotics.
Breakthroughs in reinforcement learning allowed robots to learn complex physical tasks through trial and error, much like human infants.
Reinforcement learning enabled robots to acquire policies for grasping, locomotion, and manipulation without explicit programming.

PAL Robotics unveiled TALOS, a fully electric humanoid robot with advanced joint torque sensors for industrial applications.
TALOS emphasized robust torque control and modular design suitable for industrial research and testing.
Advanced social robots began pilot deployments with improved natural language processing and emotion recognition.
Deployments focused on customer service and companion roles, testing long-term HRI and user acceptance.
Machine Learning Boom (2018-2021)
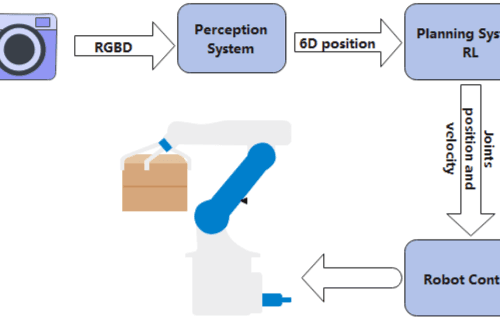
Researchers demonstrated next-generation machine vision algorithms enabling complex object manipulation in unstructured environments.
Improved vision systems combined deep learning with real-time sensing for robust perception in cluttered scenes.
A consortium showcased a modular soft robot platform designed for safe human interaction in healthcare settings.
Modular soft robots demonstrated flexible tooling for delicate tasks while reducing risks to patients and staff.
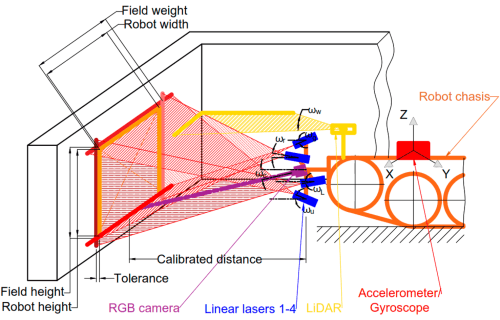
A breakthrough in multi-modal sensor fusion enhanced real-time mapping and navigation for mobile robots in dynamic environments.
Combining lidar, cameras, and IMUs improved robustness of SLAM and obstacle avoidance in crowded spaces.
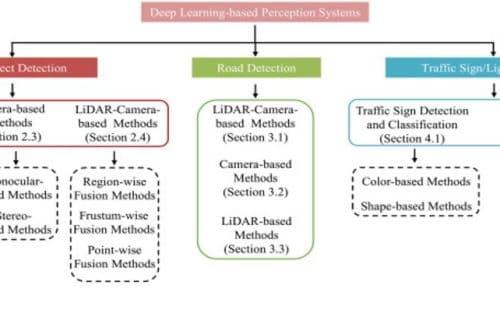
Deep learning-based perception algorithms significantly improved object recognition and decision-making in mobile robotic systems.
Deep models enabled semantic understanding of scenes and better policy decisions for navigation and manipulation.

Agility Robotics unveiled Digit, a humanoid robot designed for dynamic mobility in human-centric environments.
Digit focused on reliable bipedal mobility and manipulation for logistics and last-mile delivery tasks.

Boston Dynamics released the commercial version of its quadruped robot, Spot, marking a milestone in advanced mobile robotics.
Spot provided a robust, flexible robot for inspection, mapping, and remote sensing in commercial environments.

Robotics startups demonstrated autonomous mobile robots for contactless deliveries and sanitation, accelerated by COVID-19 demands.
Pandemic-driven use cases accelerated deployments of AMRs for logistics, cleaning, and contactless services.

Pilot projects integrated cloud robotics with real-time data analytics, enabling over-the-air updates and enhanced collaboration in smart factories.
Cloud robotics enabled centralized learning and coordination across distributed fleets, improving efficiency and uptime.

Tesla unveiled updated development plans for the Tesla Bot, signaling major investment in next-generation humanoid robotics.
Tesla's announcement highlighted automotive-scale investment into humanoid research aimed at general-purpose tasks.

Advances in reinforcement learning enabled robots to learn complex tasks by imitation, ushering in a new era of learning-based robotics.
Imitation and RL techniques reduced engineering time by letting robots learn from demonstrations and simulated experience.
Modern Era (2021+)

Aerospace and defense firms began testing robotic systems for space applications, including robotic arms and inspection drones.
Space robotics testing expanded autonomy and reliability for inspection, manipulation, and in-orbit servicing tasks.
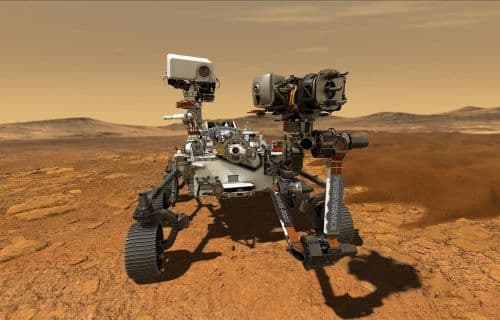
NASA's Perseverance rover landed on Mars equipped with cutting-edge robotics for sample collection and scientific analysis.
Perseverance carried dexterous tools and autonomous navigation capabilities to collect and cache Martian samples.

Field tests of Level 4+ autonomous driving systems in urban environments utilized advanced sensor arrays and AI-driven decision making.
High-level autonomy trials combined perception, mapping, and policy systems to navigate complex urban scenarios.

A pilot program demonstrated integrated swarm robotics in agriculture, with dozens of small robots cooperating for crop monitoring.
Swarm trials showed distributed sensing and coordinated behaviors could scale monitoring and precision farming tasks.

Tesla unveiled version 1 of its humanoid robot Optimus, marking a major milestone in commercial humanoid robotics.
Optimus aimed to apply Tesla's autonomy stack to humanoid form factors for physical labor and logistics.

Boston Dynamics introduced Stretch, a new robot designed to revolutionize warehouse automation and logistics.
Stretch focused on adaptable manipulation and fast pallet handling to improve throughput in distribution centers.
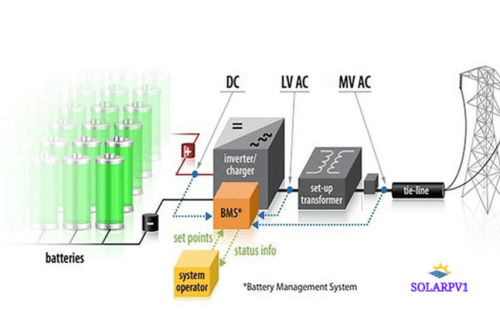
Breakthroughs in battery and energy management systems extended mobile robot operating times significantly in industrial settings.
Improved energy density and management algorithms increased runtime and reduced downtime for mobile fleets.

Figure AI launched Figure 02, a humanoid robot featuring advanced AI-driven interactive capabilities for consumer and enterprise applications.
Figure's release highlighted new entrants targeting general-purpose humanoid capabilities powered by modern AI.
Tech giants announced the integration of large behavioral models with robotic control systems, enabling greater task adaptability.
Large models provided common-sense reasoning and perception priors that improved robot generalization across tasks.

A consortium showcased the first fully integrated smart factory pilot, with robots, sensors, and cloud-based AI systems coordinating seamlessly.
Smart factory pilots demonstrated real-time coordination, predictive maintenance, and adaptive scheduling using robotic fleets.

Early trials expanded human-robot collaboration in public spaces, with robots reliably assisting customers in retail and hospitality.
Trials tested navigation, social interaction, and safety for robots operating around the public in service roles.
A major tech consortium announced a breakthrough in swarm robotics, enabling hundreds of small robots to collaborate autonomously on complex tasks.
Breakthroughs in distributed control and communication allowed larger swarms to coordinate reliably in real environments.
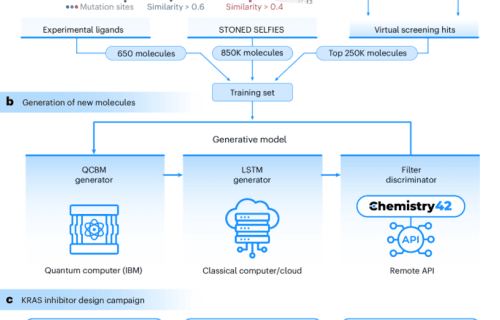
Quantum-enhanced control algorithms began transitioning from lab research to pilot projects, reducing decision-making latency in dynamic environments.
Early quantum-assisted controllers targeted specific optimization problems to speed up planning and coordination.

Projections indicated widespread integration of autonomous robots in logistics, manufacturing, and service sectors, driven by advances in AI and sensor technology.
Industry forecasts pointed to pervasive automation, with robots collaborating with humans and cloud systems at scale.