AR10 Hand
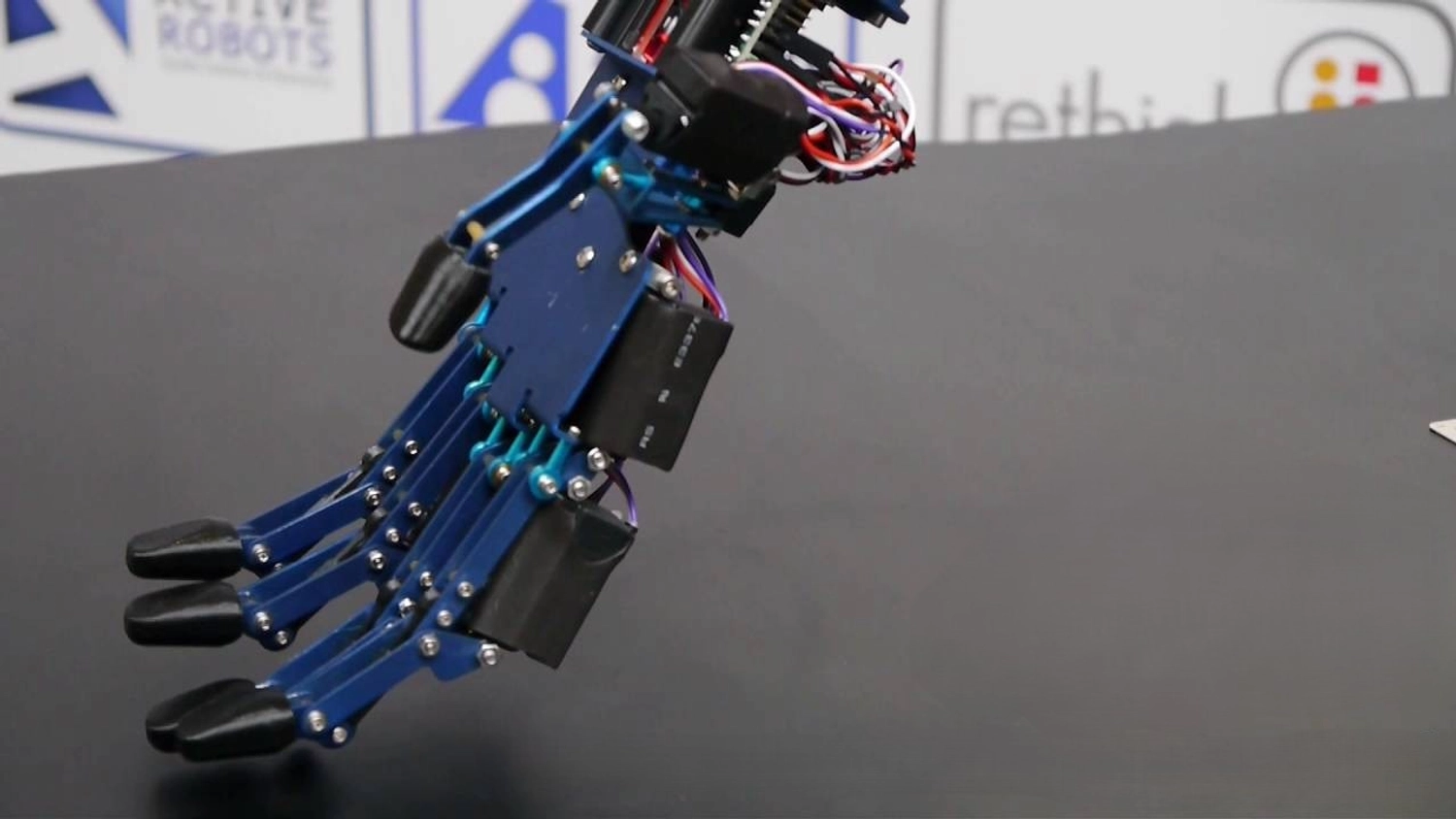
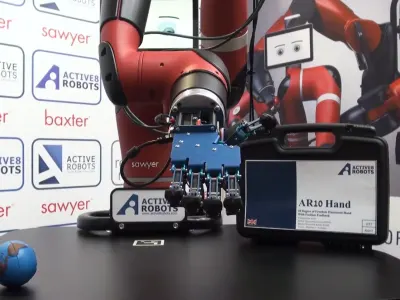
The AR10 Hand is a 10-DOF humanoid robotic hand from Actuated Robotics (also known as Active8 Robots), designed for research, teaching, and lab environments. Actuated by 10 prismatic servos and controlled via a programmable microcontroller with Maestro servo board, it enables a wide variety of poses and grasping tasks. Featuring hybrid construction with an anodized aluminum core for balanced strength and weight, it is fully ROS-compatible, customizable, and compatible with robots like Sawyer and Baxter for advanced manipulation projects.
Robot Specifications
Image Gallery
Below images are from Actuated Robotics's official sources






Review Videos
Watch expert reviews and demonstrations of this robot


One Robot
Infinite Possibilities
One Robot
Infinite Possibilities

TP-01 by Raydiculous
Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is the humanoid robot hand AR10 Hand, and what problem does it solve?
The AR10 Hand is a 10-degree-of-freedom humanoid robotic hand developed by Active8 Robots, using prismatic servo actuation. According to the manufacturer, it addresses the need for a low-cost platform for grasping research in teaching and lab environments.
Q2. What are the main capabilities and key features of AR10 Hand?
The AR10 Hand features 10 degrees of freedom actuated by servos within a programmable microcontroller, with hybrid construction balancing strength and weight. It supports a wide variety of poses and is designed for research applications.
Q3. Which industries and use cases is AR10 Hand built for?
The AR10 Hand is intended for academic research, teaching, and laboratory use in robotics, particularly humanoid grasping studies and prosthetic development. It serves as a platform expandable with sensors or robot arms.
Q4. What is the grip strength and dexterity of AR10 Hand?
The AR10 Hand provides dexterity through 10 servo-actuated degrees of freedom, enabling power and precision grasps. Specific grip strength values are not detailed by the manufacturer; capabilities focus on research-oriented manipulation.
Q5. Is AR10 Hand compatible with standard robotic arms?
The AR10 Hand is compatible with robotic arms such as Sawyer and Baxter. According to documentation, it integrates via ROS packages including URDF and MoveIt implementations for broader arm systems.
Q6. Does AR10 Hand support tactile sensing or force feedback?
The AR10 Hand's base design uses servo actuation without built-in tactile sensing, though capabilities can be expanded by adding sensors. It is used in projects incorporating external tactile feedback for manipulation studies.
Q7. What programming interfaces or SDKs are available for AR10 Hand?
The AR10 Hand supports ROS for communication and control, with Python scripts for basic operation. ROS packages include URDF models and MoveIt integration, plus tutorials for servo configuration.
Q8. How does AR10 Hand compare to other robotic end-effectors?
The AR10 Hand offers 10 degrees of freedom at lower cost compared to pneumatically actuated hands like the Shadow hand, which weighs more. It prioritizes research accessibility over heavy-duty industrial performance.
Q9. What level of maintenance is required for AR10 Hand?
Maintenance for the AR10 Hand involves loading servo settings files and applying limits via its microcontroller interface. As a research platform, it requires standard servo board checks without specified intensive upkeep.
Q10. Is AR10 Hand currently available for commercial purchase?
The AR10 Hand was available through Active8 Robots for research and academic purchase as of 2016 documentation. Current commercial status is not confirmed in available records.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.