Bimodal Crawling Hand
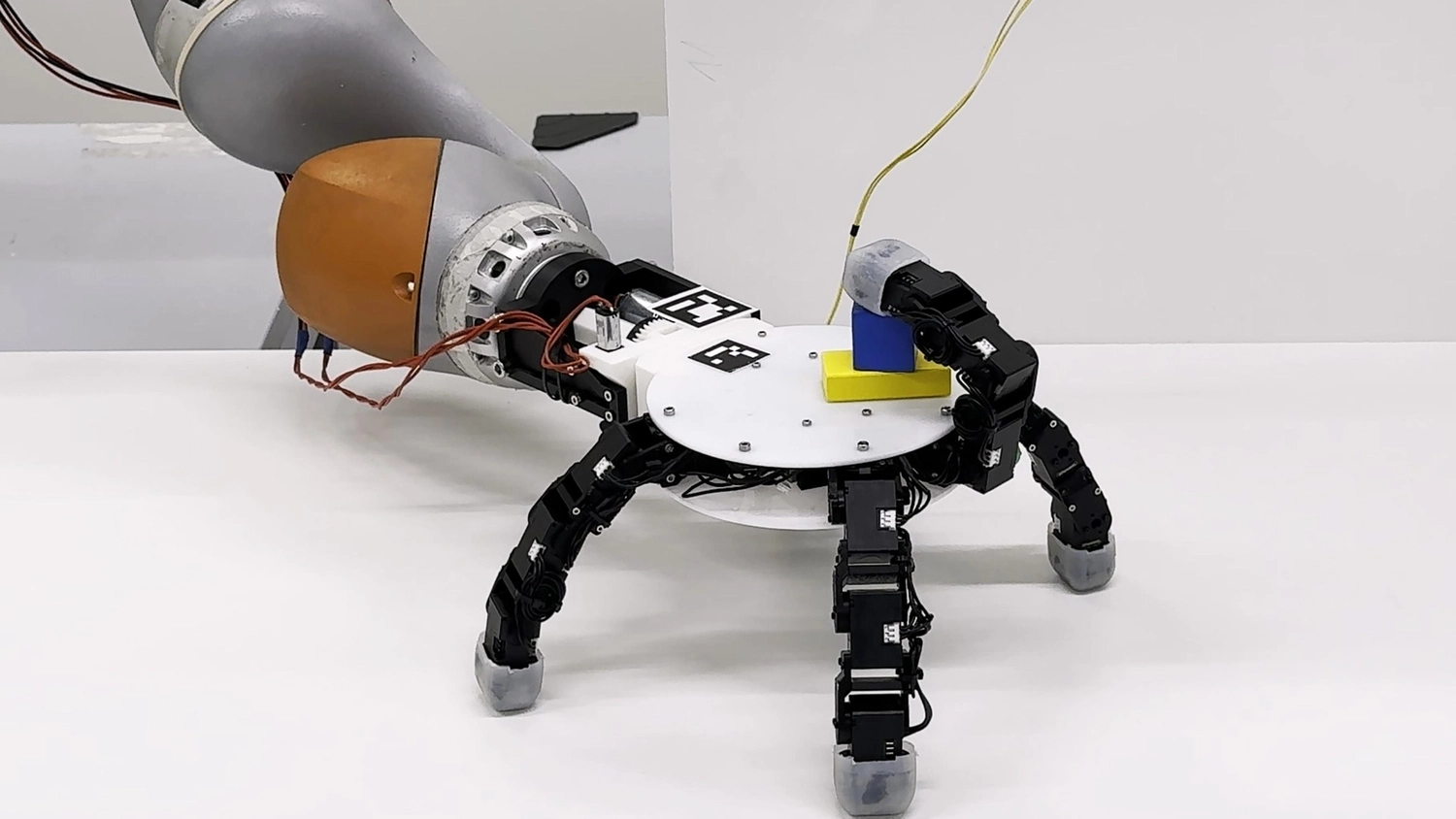
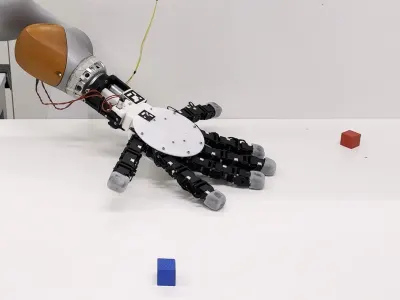
The Bimodal Crawling Hand from EPFL is a reversible, detachable robotic end-effector with symmetrical architecture supporting up to six identical silicone-tipped fingers. It performs 33 human-like grasping motions, allows any fingers to form opposable thumb pairs, and interchanges palm/back via finger reversal. It detaches from the arm to crawl spider-like, enabling loco-manipulation to grasp/carry objects beyond arm reach, even while holding multiple items on palm or back.
Robot Specifications
Image Gallery
Below images are from EPFL's official sources







Review Videos
Watch expert reviews and demonstrations of this robot



One Robot
Infinite Possibilities
One Robot
Infinite Possibilities

TP-01 by Raydiculous
Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is the humanoid robot hand Bimodal Crawling Hand, and what problem does it solve?
The Bimodal Crawling Hand is a robotic end-effector developed by EPFL that combines grasping and autonomous locomotion capabilities. It addresses limitations of traditional robotic hands by enabling independent mobility when detached from its arm, allowing retrieval of objects beyond the arm's reach while maintaining grip on multiple items simultaneously.
Q2. What are the main capabilities and key features of Bimodal Crawling Hand?
The hand features up to six identical silicone-tipped fingers with a fully symmetrical, reversible design. According to EPFL, it can perform 33 different types of human grasping motions, form dual opposable thumbs at either end, and crawl spider-like across surfaces while holding objects. The reversible palm design allows the hand to grip items on either side.
Q3. Which industries and use cases is Bimodal Crawling Hand built for?
EPFL identifies potential applications in industrial, service, and exploratory robotics. The technology targets scenarios requiring compactness and adaptability, such as retrieving objects in confined environments, expanding the reach of traditional industrial arms, and potentially prosthetic applications, though the latter remains in research phase.
Q4. What is the grip strength and dexterity of Bimodal Crawling Hand?
With five fingers, the hand replicates most traditional human grasps. When equipped with more than five fingers, it can perform tasks typically requiring two human hands, such as unscrewing bottle caps or driving screws. According to EPFL, there is no inherent limitation on the number of objects it can hold by adding additional fingers.
Q5. Is Bimodal Crawling Hand compatible with standard robotic arms?
The hand is designed as a modular end-effector that can attach to and detach from robotic arms. Its symmetrical architecture and reversible design enable integration with various arm configurations, though specific compatibility details with particular arm models are not detailed in available documentation.
Q6. Does Bimodal Crawling Hand support tactile sensing or force feedback?
The search results do not provide information regarding tactile sensing or force feedback capabilities. The design emphasizes mechanical compliance through silicone-tipped fingers and spring-loaded joints rather than advanced sensor integration.
Q7. What programming interfaces or SDKs are available for Bimodal Crawling Hand?
Available documentation does not specify programming interfaces, SDKs, or software frameworks for the Bimodal Crawling Hand. The design reportedly achieves dexterity through mechanical structure and compliant materials rather than complex programming requirements.
Q8. How does Bimodal Crawling Hand compare to other robotic end-effectors?
The hand's primary distinction is its combination of symmetrical, reversible design with autonomous crawling capability. According to EPFL, the symmetry enhances crawling efficiency, streamlines multi-object interaction planning, and reduces the need for intricate movements compared to conventional robotic or anthropomorphic hands.
Q9. What level of maintenance is required for Bimodal Crawling Hand?
Specific maintenance requirements are not documented in available sources. The design incorporates silicone-tipped fingers and spring-loaded joints, suggesting durability-focused engineering, but detailed maintenance protocols have not been publicly disclosed.
Q10. Is Bimodal Crawling Hand currently available for commercial purchase?
The Bimodal Crawling Hand remains a research prototype developed at EPFL. Research findings were published in Nature Communications, but commercial availability status and timelines for market release have not been announced in available documentation.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.