DexPilot Hand
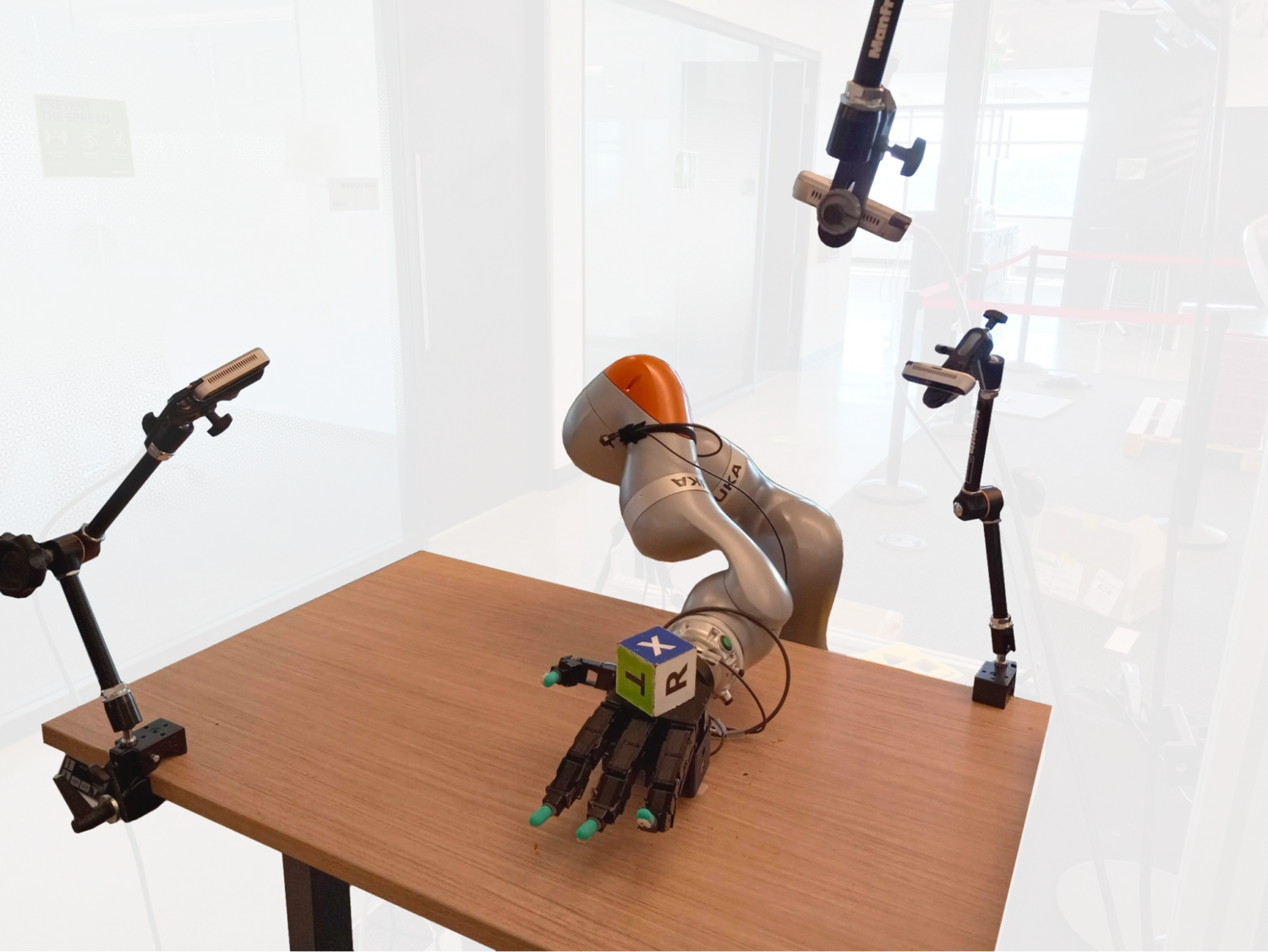
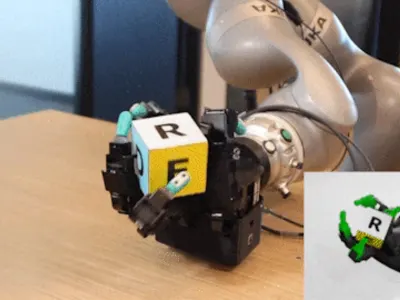
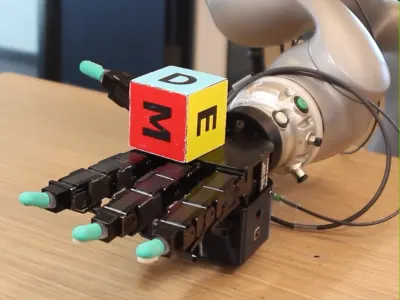
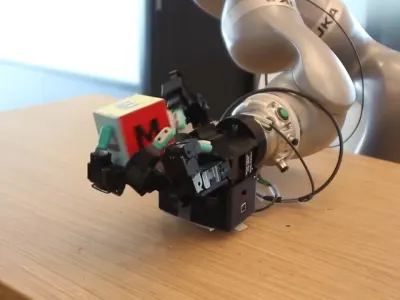
The DexPilot Hand is a key component of NVIDIA Research's low-cost, vision-based teleoperation system, DexPilot, enabling full control of a high-DoF dexterous robotic hand-arm setup via bare-hand depth observation. It supports complex manipulation tasks beyond pick-and-place, such as in-hand object handling, generating high-dimensional state-action data for learning sensorimotor policies. Demonstrated at ICRA 2020, it emphasizes affordability and reliability for research in teleoperation and dexterity.
Robot Specifications
Image Gallery
Below images are from NVIDIA's official sources

Review Videos
Watch expert reviews and demonstrations of this robot

One Robot
Infinite Possibilities
One Robot
Infinite Possibilities

TP-01 by Raydiculous
Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is the humanoid robot hand DexPilot Hand, and what problem does it solve?
DexPilot is a vision-based teleoperation system developed by NVIDIA Research for controlling a dexterous robotic hand-arm with 23 degrees of actuation. According to NVIDIA Research, it addresses the high cost and limited control of existing teleoperation solutions for multi-fingered robots by using bare hand observation.
Q2. What are the main capabilities and key features of DexPilot Hand?
DexPilot enables complete control of a 23 DoA robotic hand-arm system via vision-based tracking of the human hand. Key features include support for complex manipulation tasks beyond pick-and-place, such as in-hand object handling, according to NVIDIA Research publications.
Q3. Which industries and use cases is DexPilot Hand built for?
DexPilot targets research in dexterous robotics, teleoperation, and embodied AI. NVIDIA Research demonstrates its use for collecting high-dimensional state-action data to train sensorimotor policies for manipulation tasks.
Q4. What is the grip strength and dexterity of DexPilot Hand?
DexPilot supports dexterous operations including pinch grips and in-hand manipulation across its 23 degrees of actuation. Specific grip strength metrics are not detailed in NVIDIA Research descriptions, which emphasize control reliability over quantified force.
Q5. Is DexPilot Hand compatible with standard robotic arms?
DexPilot integrates with robotic arms like the FR3 for full hand-arm teleoperation. According to NVIDIA Research, it uses vision-based tracking to map human hand motion to the combined system without specialized hardware beyond cameras.
Q6. Does DexPilot Hand support tactile sensing or force feedback?
NVIDIA Research publications on DexPilot focus on vision-based control and do not describe integrated tactile sensing or force feedback. The system relies on visual observation for teleoperation of manipulation tasks.
Q7. What programming interfaces or SDKs are available for DexPilot Hand?
DexPilot employs neural network-based tracking with kinematic retargeting and control threads, as described by NVIDIA researchers. No specific public SDKs are mentioned; it is presented as a research system with custom software pipelines.
Q8. How does DexPilot Hand compare to other robotic end-effectors?
Compared to alternatives like ByteDexter, DexPilot uses low-cost vision for 23 DoA control, enabling complex tasks at reduced expense. NVIDIA Research highlights its performance in speed and reliability metrics across manipulation benchmarks.
Q9. What level of maintenance is required for DexPilot Hand?
As a research prototype, DexPilot's maintenance details are not specified in NVIDIA publications. It comprises off-the-shelf cameras and a robotic hand-arm, suggesting standard hardware upkeep for vision and actuation components.
Q10. Is DexPilot Hand currently available for commercial purchase?
DexPilot remains a research project from NVIDIA Seattle Robotics Lab, presented in 2020 publications. NVIDIA Research has not announced commercial availability or sales as of the latest documented information.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.