
InMoov Hand V2
The InMoov Hand by V2 Swan Robotics is a 3D-printed anthropomorphic robotic hand derived from the open-source InMoov project, optimized for DIY humanoid robot assembly. It features five independently actuated fingers using tendon-driven servos for realistic grasping, with custom servo recommendations like JX PDI-6221MG or HK15298B for reliable torque. Built with Arduino control and optional fingertip tactile sensors, it emphasizes accessibility for hobbyists and researchers, supporting teleoperation and basic manipulation tasks in open-source humanoid platforms.
Robot Specifications
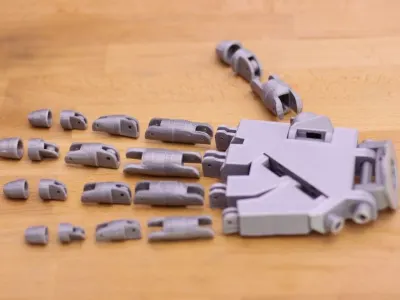
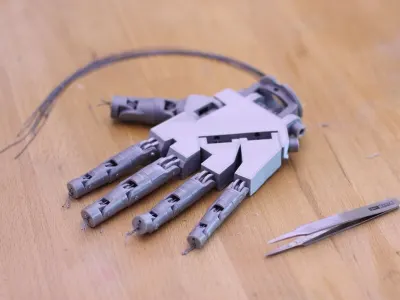
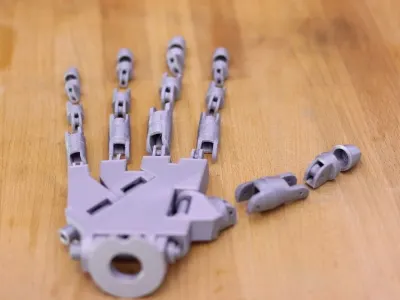
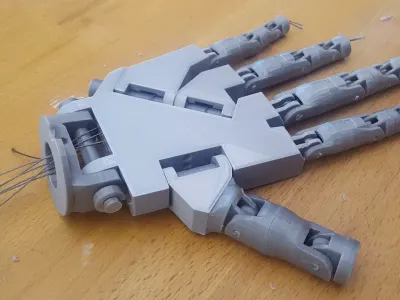
Image Gallery
Below images are from Swan Robotics's official sources




Review Videos
Watch expert reviews and demonstrations of this robot

One Robot
Infinite Possibilities
One Robot
Infinite Possibilities

TP-01 by Raydiculous
Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is the humanoid robot hand InMoov Hand, and what problem does it solve?
The InMoov Hand is an open-source 3D-printed robotic hand component of the InMoov robot, designed for replication on home 3D printers with a 12x12x12cm build area. It addresses accessibility in robotics education and prototyping by enabling low-cost construction for makers and hobbyists.
Q2. What are the main capabilities and key features of InMoov Hand?
The InMoov Hand features servo-driven fingers for basic grasping and motion, with designs supporting independent finger control in modifications. Key features include 3D-printable parts and integration with controllers like Arduino for animation and gesture simulation.
Q3. Which industries and use cases is InMoov Hand built for?
InMoov Hand is intended for educational projects, hobbyist robotics, and prototyping in universities and makerspaces. Use cases include gesture demonstration, basic object interaction, and development platforms for open-source robot experimentation.
Q4. What is the grip strength and dexterity of InMoov Hand?
Grip strength and dexterity rely on standard servos per finger, enabling timed movements and positions like rock-paper-scissors gestures. According to project documentation, it supports precision for educational animations but lacks specified force limits.
Q5. Is InMoov Hand compatible with standard robotic arms?
InMoov Hand integrates with the InMoov arm design, using compatible servo wiring and controllers like Arduino or MyRobotLab. Modifications allow pairing with EZ-Robot systems and forearm components from the original InMoov project.
Q6. Does InMoov Hand support tactile sensing or force feedback?
Standard InMoov Hand designs do not include built-in tactile sensing, though project suggestions propose adding touch sensors to the palm for pressure-adjusted grasping. Force feedback is not natively supported in base configurations.
Q7. What programming interfaces or SDKs are available for InMoov Hand?
Programming uses Arduino sketches for servo control, MyRobotLab for voice and gesture integration, and Python scripts for animation. Compatibility extends to EZ-Robot controllers and services like Kinect or Leap Motion.
Q8. How does InMoov Hand compare to other robotic end-effectors?
Unlike commercial end-effectors, InMoov Hand emphasizes open-source 3D printability for cost-effective replication over industrial precision. It offers similar basic dexterity to hobbyist designs but requires user assembly and lacks advanced sensors.
Q9. What level of maintenance is required for InMoov Hand?
Maintenance involves periodic servo checks and 3D part replacements due to wear from motion. Project resources recommend printing spare components and recalibrating controllers for sustained operation in educational settings.
Q10. Is InMoov Hand currently available for commercial purchase?
InMoov Hand is provided as open-source designs for 3D printing, with no commercial purchase option from V2 Swan Robotics. Users source parts independently for self-assembly, aligning with its maker-focused development platform.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.