Tactile SoftHand-A
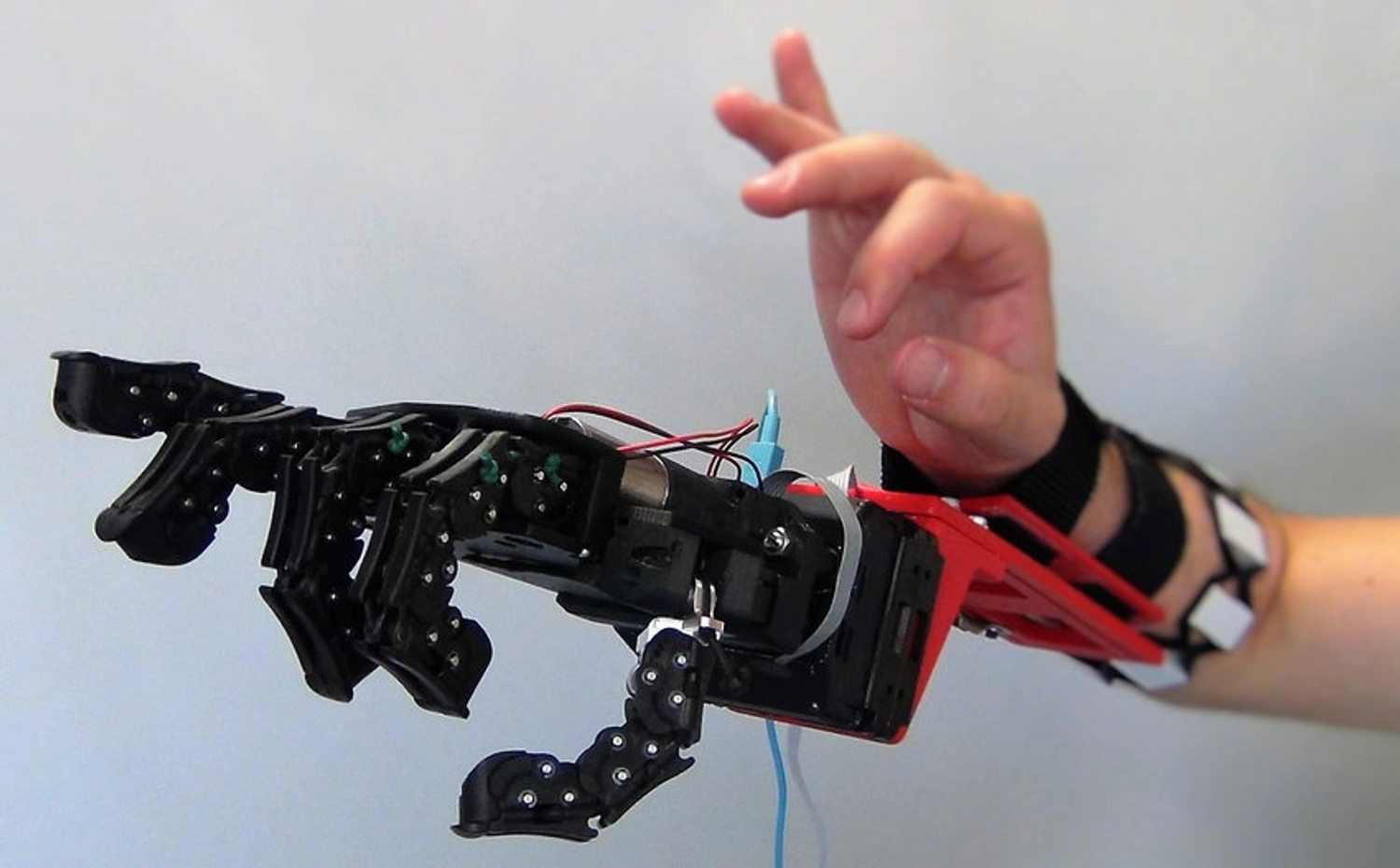
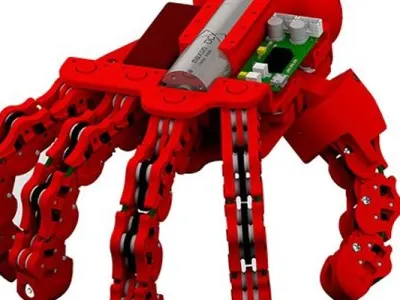
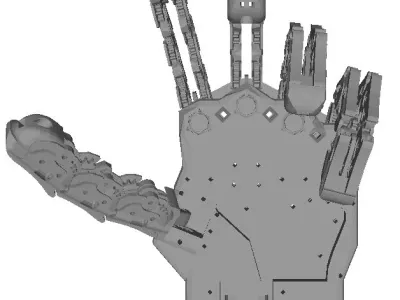
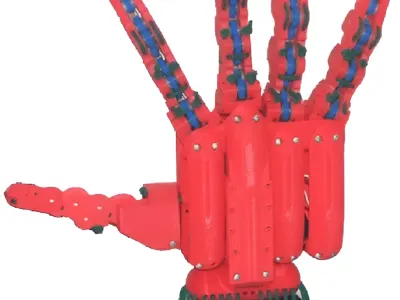
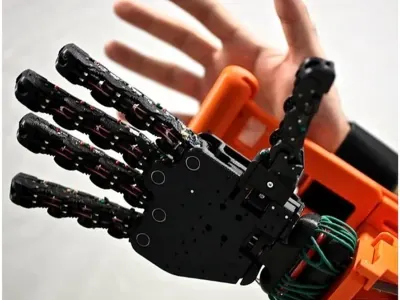
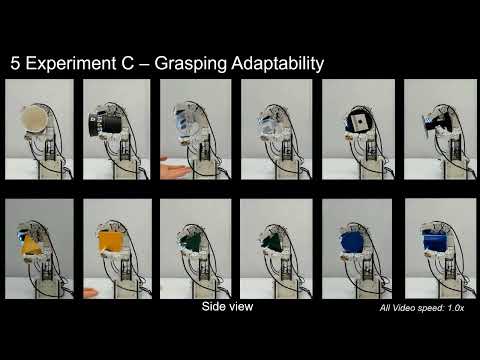
The Tactile SoftHand-A is a 3D-printed, highly underactuated, five-finger anthropomorphic robot hand developed by researchers from University of Pisa and IIT, inspired by the Pisa/IIT SoftHand. It features 15 degrees of freedom actuated by 2 motors via an antagonistic dual-tendon mechanism, enabling adaptive grasping. Integrated optical or piezoresistive tactile sensors in fingertips provide real-time force, pose estimation, and slip resistance, supporting compliant manipulation, teleoperation, and in-hand dexterity with a 7.5:1 underactuation ratio.
Robot Specifications
Image Gallery
Below images are from Italian Institute of Technology (IIT)'s official sources
Review Videos
Watch expert reviews and demonstrations of this robot
One Robot
Infinite Possibilities
One Robot
Infinite Possibilities

TP-01 by Raydiculous
Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is the humanoid robot hand Tactile SoftHand-A, and what problem does it solve?
Tactile SoftHand-A is a 3D-printed, highly underactuated, five-finger robotic hand developed by researchers at University of Pisa and IIT, inspired by the Pisa/IIT SoftHand. It addresses challenges in creating low-cost, adaptable grasping mechanisms for objects of varying shapes using minimal actuators and integrated tactile sensing.
Q2. What are the main capabilities and key features of Tactile SoftHand-A?
The hand features 15 degrees of freedom controlled by two actuators via a dual-tendon antagonistic mechanism, fully 3D-printed tactile sensors in fingertips, and adaptive grasping that adjusts to contact and slippage. According to University of Pisa and IIT, it enables human-hand-guided tactile feedback for compliant manipulation.
Q3. Which industries and use cases is Tactile SoftHand-A built for?
Tactile SoftHand-A targets research in prosthetics, telemanipulation, and adaptive in-hand manipulation. University of Pisa and IIT researchers evaluate it for scenarios requiring gentle handling, disturbance rejection, and human-robot interaction in robotic grasping experiments.
Q4. What is the grip strength and dexterity of Tactile SoftHand-A?
The hand provides dexterity through underactuation with a 7.5
Q5. Is Tactile SoftHand-A compatible with standard robotic arms?
Tactile SoftHand-A uses a modular 3D-printable design intended for integration with robotic systems. University of Pisa and IIT demonstrations include synergy with human-guided control, suggesting adaptability to standard arm interfaces through its tendon-actuated base.
Q6. Does Tactile SoftHand-A support tactile sensing or force feedback?
Yes, it integrates fully 3D-printed optical and piezoresistive tactile sensors directly into fingertips, enabling real-time detection of contact, slippage, and deformation. University of Pisa and IIT developed a control scheme combining this with antagonistic tendons for closed-loop grasping.
Q7. What programming interfaces or SDKs are available for Tactile SoftHand-A?
The design includes open-source releases for building and control, with schemes using SSIM-based metrics and CNN for pose and force estimation from tactile data. University of Pisa and IIT provide openly released designs to support custom programming for underactuated operation.
Q8. How does Tactile SoftHand-A compare to other robotic end-effectors?
Compared to non-tactile or non-antagonistic hands, it offers higher underactuation and integrated sensing for improved adaptability in complex grasps. According to University of Pisa and IIT evaluations, it outperforms predecessors in compliant manipulation and human-like gesture synchronization.
Q9. What level of maintenance is required for Tactile SoftHand-A?
As a fully 3D-printed design with tendon mechanisms and no assembly for sensors, it requires minimal maintenance focused on actuator and tendon checks. University of Pisa and IIT emphasize its low-cost, accessible construction to reduce upkeep in research settings.
Q10. Is Tactile SoftHand-A currently available for commercial purchase?
Tactile SoftHand-A designs are openly released by University of Pisa and IIT researchers for replication, but no commercial purchase availability is announced. It remains a research prototype as of latest publications.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.