Torobo Hand
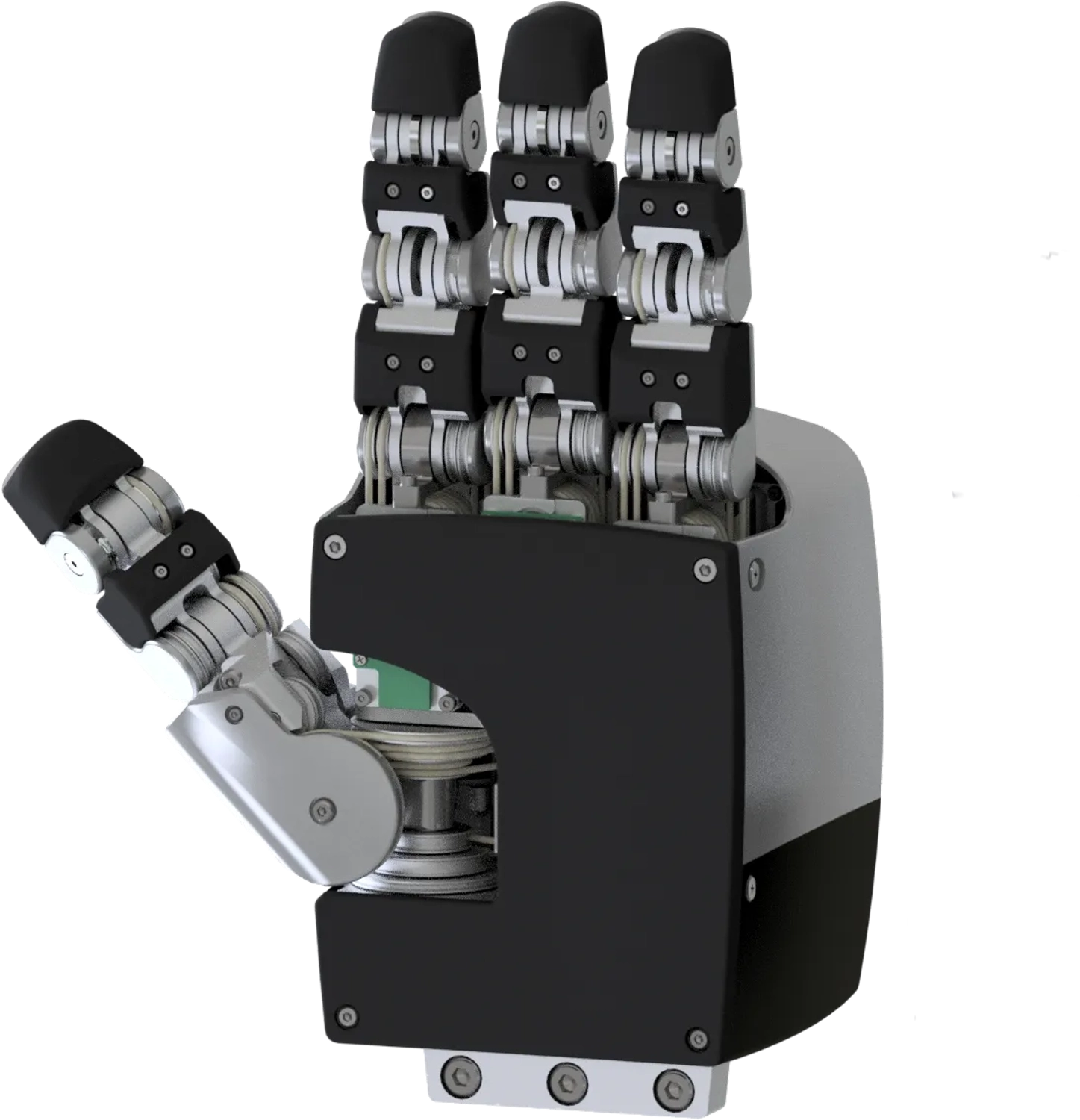
The Torobo Hand is a human hand-sized dexterous multi-fingered robotic hand offering both dexterity and strength for grasping and object manipulation. Featuring a joint configuration identical to the human hand with 16 degrees of freedom, it integrates nearly 200 pressure sensors and backdrivable torque-controlled actuators, making it ideal for applied machine learning research and real-world manipulation tasks.
Robot Specifications
Image Gallery
Below images are from Tokyo Robotics's official sources








Review Videos
Watch expert reviews and demonstrations of this robot

One Robot
Infinite Possibilities
One Robot
Infinite Possibilities

TP-01 by Raydiculous
Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is the humanoid robot hand Torobo Hand, and what problem does it solve?
Torobo Hand is a human hand-sized multi-fingered robotic hand developed by Tokyo Robotics for dexterous object manipulation. According to the manufacturer, it addresses challenges in grasping and in-hand manipulation for real-world tasks by replicating human hand joint configurations.
Q2. What are the main capabilities and key features of Torobo Hand?
Torobo Hand features 10 actuated joints plus coupled joints, torque-controlled backdrivable actuators, and distributed pressure sensors across fingers and palm. According to Tokyo Robotics, these enable stable grasping, shape adaptation, and rich tactile feedback for research applications.
Q3. Which industries and use cases is Torobo Hand built for?
Torobo Hand is designed for robotics research, particularly object manipulation tasks involving active contact. Tokyo Robotics states it supports machine learning studies and automation of grasping and dexterous handling in real-world environments.
Q4. What is the grip strength and dexterity of Torobo Hand?
Torobo Hand provides approximately 10N grasp force at each fingertip with a configuration matching human hand joints for dexterity. According to the manufacturer, this allows both stable grasping and in-hand manipulation of various objects.
Q5. Is Torobo Hand compatible with standard robotic arms?
Torobo Hand is ROS 2 compatible, facilitating integration with other robots and software. Tokyo Robotics indicates it connects via Ethernet and 24VDC power, making it suitable as an end-effector for compatible robotic systems.
Q6. Does Torobo Hand support tactile sensing or force feedback?
Torobo Hand includes nearly 200 pressure sensing points on fingers, thumb, and palm, plus joint encoders. The manufacturer notes this provides real-time tactile feedback, supporting torque control and impedance for force-aware operations.
Q7. What programming interfaces or SDKs are available for Torobo Hand?
Torobo Hand supports ROS 2 for control and integration, with demo software and user manuals provided. According to Tokyo Robotics, it enables operation from a user's PC via Ethernet for trajectory planning and sensor data access.
Q8. How does Torobo Hand compare to other robotic end-effectors?
Torobo Hand offers human-scale size, multi-fingered dexterity, and torque control not common in simpler grippers. Tokyo Robotics highlights its joint configuration and tactile sensors as enabling more human-like manipulation than typical parallel-jaw end-effectors.
Q9. What level of maintenance is required for Torobo Hand?
Maintenance details for Torobo Hand are not specified in available documentation. Tokyo Robotics provides interchangeable fingertips and user manuals, suggesting routine checks on sensors and actuators for research use.
Q10. Is Torobo Hand currently available for commercial purchase?
Torobo Hand availability is listed as prototype stage by some sources, with bundled items like cables and software offered. Tokyo Robotics provides contact for inquiries, but confirms no direct commercial purchase details as of latest information.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.