
GelSight Svelte Hand
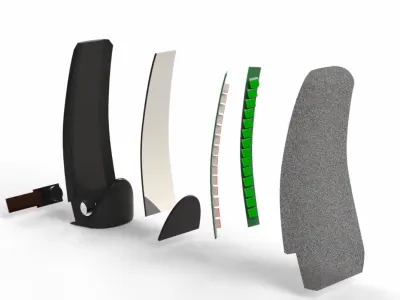
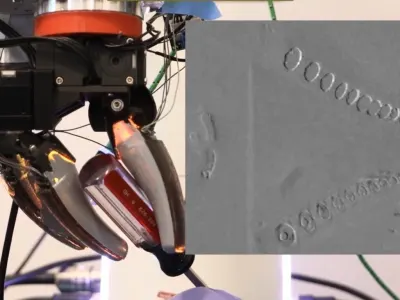
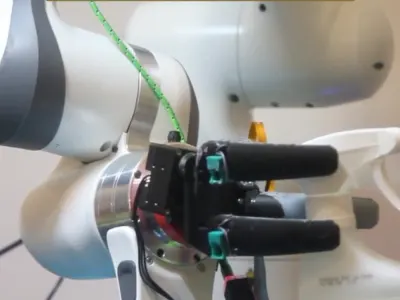
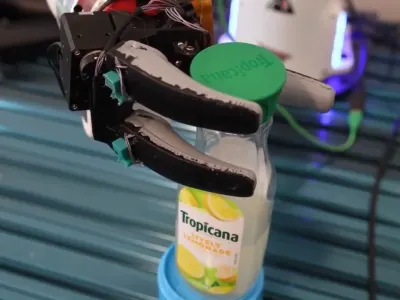
The GelSight Svelte Hand is a novel 3-finger, 2-DoF tactile robotic hand developed by MIT CSAIL for dexterous manipulation. It integrates GelSight Svelte finger sensors, each using a single low-cost camera (e.g., Pi Camera ~USD $20) with mirrors for full-length tactile and proprioceptive sensing via clear silicone coated with metallic paint. Supported by a semi-rigid endoskeleton and soft silicone cover, it performs pinch grasps, power grasps, lateral grasps, and intermediate grasps with high-resolution surface detail capture (<1 micrometer depth) and torque estimation via CNN on LED movements in a flexible backbone.
Robot Specifications
Image Gallery
Below images are from MIT's official sources




Review Videos
Watch expert reviews and demonstrations of this robot


One Robot
Infinite Possibilities
One Robot
Infinite Possibilities

TP-01 by Raydiculous
Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is the humanoid robot hand GelSight Svelte Hand, and what problem does it solve?
GelSight Svelte Hand is a three-finger, two-degree-of-freedom robotic hand developed by MIT CSAIL researchers. It addresses limitations of flat tactile sensors by providing sensing along the full length of curved, human-like fingers for versatile grasping.
Q2. What are the main capabilities and key features of GelSight Svelte Hand?
The hand performs pinch grasps, power grasps, and lateral grasps using fingers with a semi-rigid endoskeleton covered in soft silicone. Each finger employs one camera, mirrors, and LEDs for tactile and proprioceptive sensing over an extended area.
Q3. Which industries and use cases is GelSight Svelte Hand built for?
GelSight Svelte Hand is designed for robotic manipulation tasks requiring precise, adaptive grasping, such as handling small or heavy objects. According to MIT CSAIL, it targets applications in dexterous robotics research and versatile object interaction.
Q4. What is the grip strength and dexterity of GelSight Svelte Hand?
The hand supports precision, power, and intermediate grasps through its three-finger, two-DoF design with curved fingers. Dexterity derives from full-length tactile feedback and backbone curvature estimation for torque, as described by MIT CSAIL.
Q5. Is GelSight Svelte Hand compatible with standard robotic arms?
GelSight Svelte Hand features a modular design for integration into robotic systems, with each 37-gram finger suitable for end-effector mounting. MIT CSAIL documentation indicates potential for attachment to various arms, though specific adapters may be required.
Q6. Does GelSight Svelte Hand support tactile sensing or force feedback?
Yes, it provides rich tactile sensing via a single camera per finger capturing deformations through mirrors and silicone, plus proprioceptive feedback from a flexible backbone. Pressure and curvature are estimated using light saturation and CNN analysis.
Q7. What programming interfaces or SDKs are available for GelSight Svelte Hand?
MIT CSAIL provides details on tactile signal processing via convolutional neural networks for torque estimation from images. Specific SDKs or interfaces are outlined in associated research papers and project websites for sensor data integration.
Q8. How does GelSight Svelte Hand compare to other robotic end-effectors?
Unlike parallel-jaw grippers limited to pinch grasps, GelSight Svelte Hand enables power and lateral grasps with full-finger tactile coverage. It extends prior GelSight technology to curved, efficient forms using one camera per finger, per MIT CSAIL research.
Q9. What level of maintenance is required for GelSight Svelte Hand?
The hand uses durable silicone coverings and simple optical components like a low-cost camera and LEDs. Maintenance involves periodic checks on flexible backbones and sensors, as implied in MIT CSAIL fabrication descriptions for research prototypes.
Q10. Is GelSight Svelte Hand currently available for commercial purchase?
GelSight Svelte Hand is a research prototype from MIT CSAIL, detailed in 2023 publications. No commercial availability has been announced; it remains accessible via project resources for academic and development purposes.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.