
ORCA Hand
The ORCA Hand is an open-source, tendon-driven, anthropomorphic robotic hand with 17 degrees of freedom, including an opposable thumb and actuated wrist, designed for human-like dexterity. It features integrated tactile sensors on all fingertips, popping joints for quick assembly (<8 hours), auto-calibration, and tensioning systems for reliability. Built for under 2,000 CHF in materials, it supports teleoperation, imitation learning, and sim-to-real RL, with proven durability over 10,000 cycles (~20 hours).
Robot Specifications
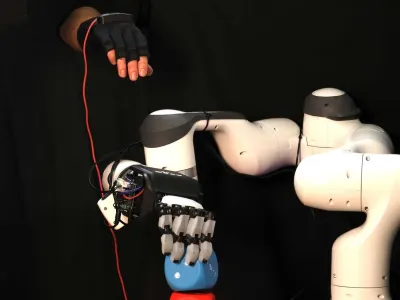
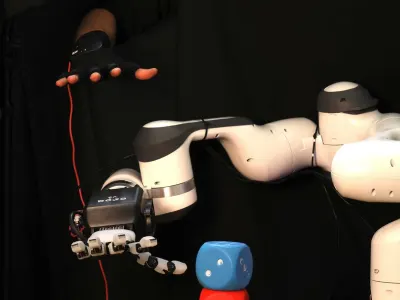
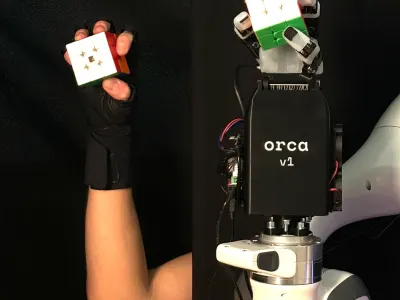
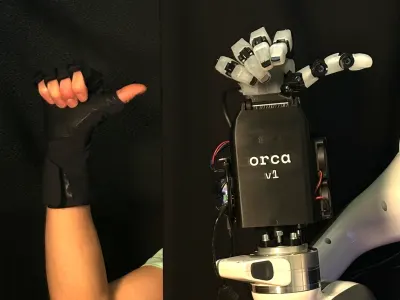
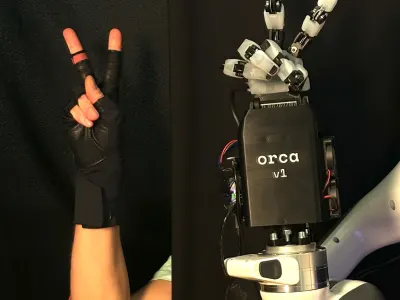
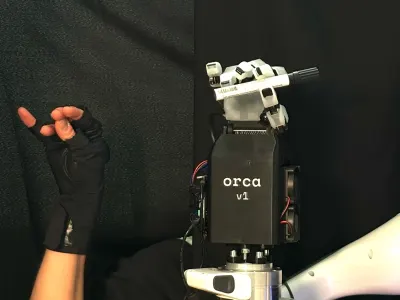
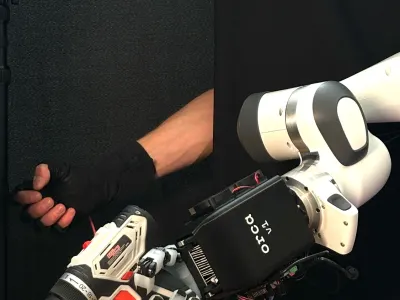
Image Gallery
Below images are from ETH Zurich (Robotic Systems Lab)'s official sources

Review Videos
Watch expert reviews and demonstrations of this robot


One Robot
Infinite Possibilities
One Robot
Infinite Possibilities

TP-01 by Raydiculous
Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is the humanoid robot hand ORCA Hand, and what problem does it solve?
The ORCA Hand is an open-source, anthropomorphic robotic hand developed by the Soft Robotics Lab at ETH Zurich. It addresses challenges in providing reliable, low-cost dexterous manipulation for robotics research and education.
Q2. What are the main capabilities and key features of ORCA Hand?
ORCA Hand features 17 degrees of freedom in a tendon-driven design with an opposable thumb and actuated wrist. According to ETH Zurich (Robotic Systems Lab), it includes integrated tactile sensors, auto-calibration, and popping joints for reliability.
Q3. Which industries and use cases is ORCA Hand built for?
ORCA Hand targets robotics research, including teleoperation, imitation learning, and sim-to-real reinforcement learning. It supports tasks like in-hand manipulation and autonomous waste sorting in lab settings.
Q4. What is the grip strength and dexterity of ORCA Hand?
ORCA Hand demonstrates dexterity in complex tasks such as object orientation and picking. According to ETH Zurich (Soft Robotics Lab), its tendon-driven structure enables human-like grasping of everyday objects.
Q5. Is ORCA Hand compatible with standard robotic arms?
ORCA Hand's modular, anthropomorphic design facilitates integration with various robotic platforms. Its lightweight structure and standard servo motors support mounting on common arms for manipulation tasks.
Q6. Does ORCA Hand support tactile sensing or force feedback?
Yes, ORCA Hand includes integrated tactile sensors for contact detection and grip adjustment. ETH Zurich (Robotic Systems Lab) notes these enable precise, adaptive manipulation in real-time operations.
Q7. What programming interfaces or SDKs are available for ORCA Hand?
ORCA Hand provides open-source design files, source code, and a full software stack for learning and control. These resources support teleoperation, imitation learning, and reinforcement learning implementations.
Q8. How does ORCA Hand compare to other robotic end-effectors?
Compared to traditional grippers, ORCA Hand offers higher dexterity via 17 DoF and human-like proportions. ETH Zurich benchmarks show it excels in tasks requiring fine motor control and durability over extended cycles.
Q9. What level of maintenance is required for ORCA Hand?
ORCA Hand withstands over 10,000 operation cycles without failure, per ETH Zurich tests. Its auto-calibration and tensioning systems reduce complexity, though periodic checks on tendons and sensors are advised.
Q10. Is ORCA Hand currently available for commercial purchase?
ORCA Hand v1 is in production and available on backorder through the manufacturer's site. It is offered as an open-source platform for research and development purposes.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.