RBO Hand 3
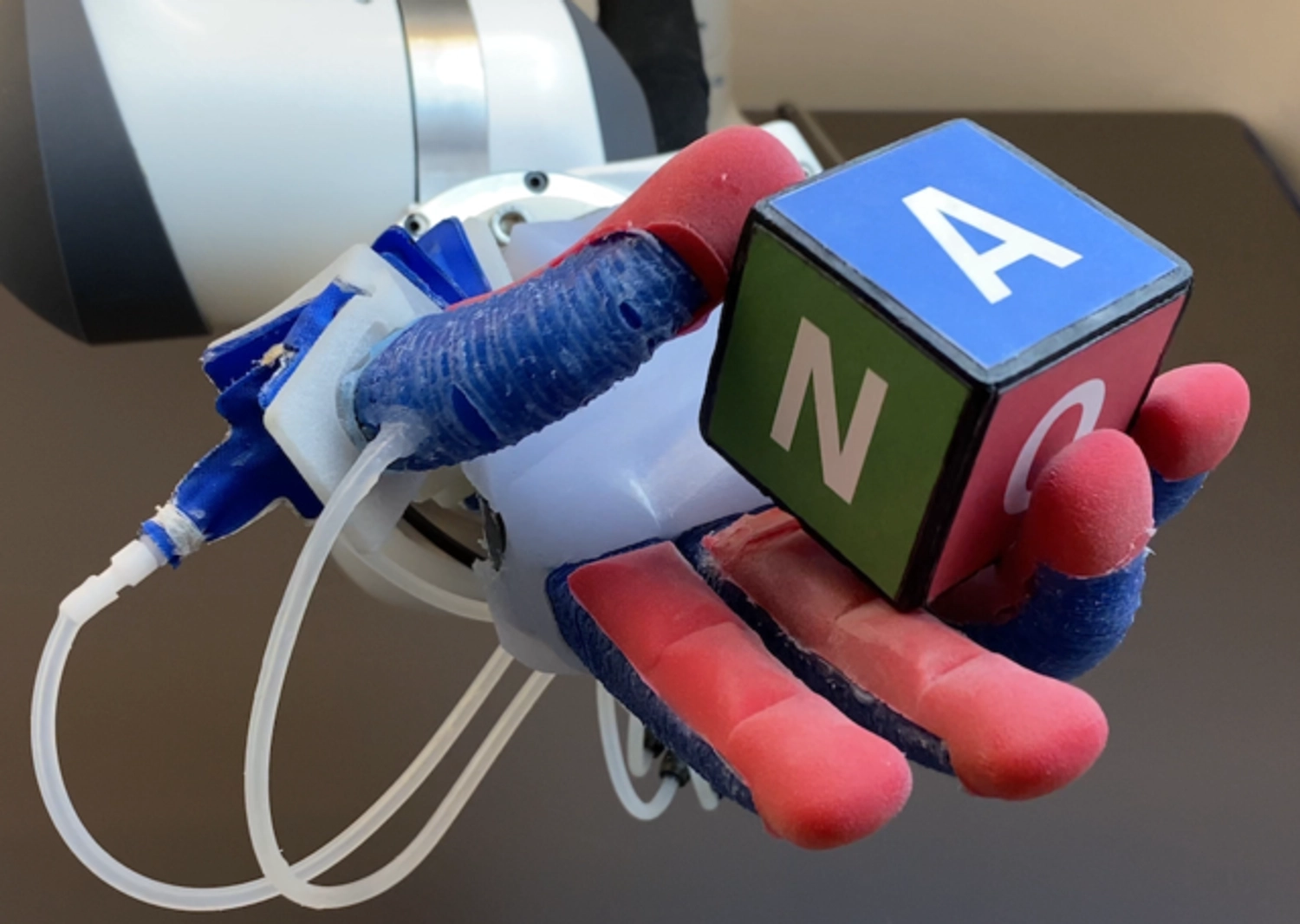
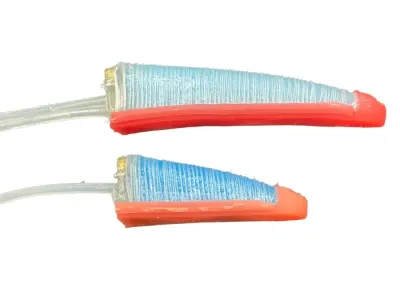
The RBO Hand 3 is a highly capable anthropomorphic soft hand developed by TU Berlin's Robotics and Biology Lab, featuring pneumatic actuation for dexterous manipulation. It combines 16 independent degrees of actuation with intrinsic compliance via two-chambered fingers, an opposable thumb, actuated palm, and finger spreading. Designed for real-world experiments, it replicates human hand functions, achieves top Kapandji thumb opposition scores, supports all 33 GRASP taxonomy types, and enables in-hand manipulation.
Robot Specifications
Image Gallery
Below images are from TU Berlin's official sources





Review Videos
Watch expert reviews and demonstrations of this robot




One Robot
Infinite Possibilities
One Robot
Infinite Possibilities

TP-01 by Raydiculous
Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is the humanoid robot hand RBO Hand 3, and what problem does it solve?
The RBO Hand 3 is a compliant soft robotic hand developed by TU Berlin's Robotics and Biology Lab. It addresses challenges in robotic grasping by enabling passive adaptation to object shapes through compliance and morphology.
Q2. What are the main capabilities and key features of RBO Hand 3?
According to TU Berlin, the RBO Hand 3 features 16 independent degrees of actuation and a truly opposable thumb that masters the Kapandji test with 10 out of 10 points, allowing it to reach each fingertip and the base of the little finger.
Q3. Which industries and use cases is RBO Hand 3 built for?
The RBO Hand 3 is designed for research in robotics, particularly for tasks requiring robust grasping of varied objects from tabletops using a single closing synergy, as demonstrated in prototypes by TU Berlin.
Q4. What is the grip strength and dexterity of RBO Hand 3?
TU Berlin reports that the RBO Hand 3 achieves high dexterity via its opposable thumb passing the full Kapandji test. Its compliant design supports robust grips on diverse objects through passive shape adaptation.
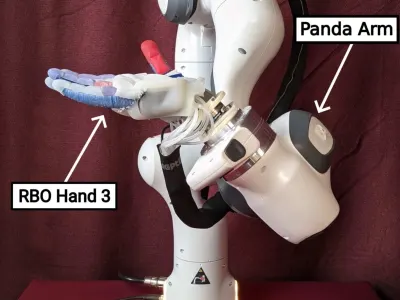
Q5. Is RBO Hand 3 compatible with standard robotic arms?
Compatibility details for the RBO Hand 3 with standard robotic arms are not specified in available TU Berlin documentation. It is presented as a standalone hand prototype for research applications.
Q6. Does RBO Hand 3 support tactile sensing or force feedback?
Public information from TU Berlin on the RBO Hand 3 does not detail tactile sensing or force feedback capabilities. Its compliance enables passive grasping without explicit mention of such sensors.
Q7. What programming interfaces or SDKs are available for RBO Hand 3?
TU Berlin has not publicly detailed specific programming interfaces or SDKs for the RBO Hand 3. It is utilized in lab prototypes for grasping demonstrations.
Q8. How does RBO Hand 3 compare to other robotic end-effectors?
The RBO Hand 3 distinguishes itself with full Kapandji thumb opposition and 16 actuation degrees for compliant grasping, differing from rigid end-effectors by relying on morphology for adaptation, per TU Berlin.
Q9. What level of maintenance is required for RBO Hand 3?
Maintenance requirements for the RBO Hand 3 are not outlined in TU Berlin's available materials. As a soft robotic prototype, it may involve periodic checks on its compliant actuators.
Q10. Is RBO Hand 3 currently available for commercial purchase?
The RBO Hand 3 remains a research prototype from TU Berlin's Robotics and Biology Lab, with no announcements of commercial availability as of the latest public demonstrations in 2020.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.