Schunk SVH
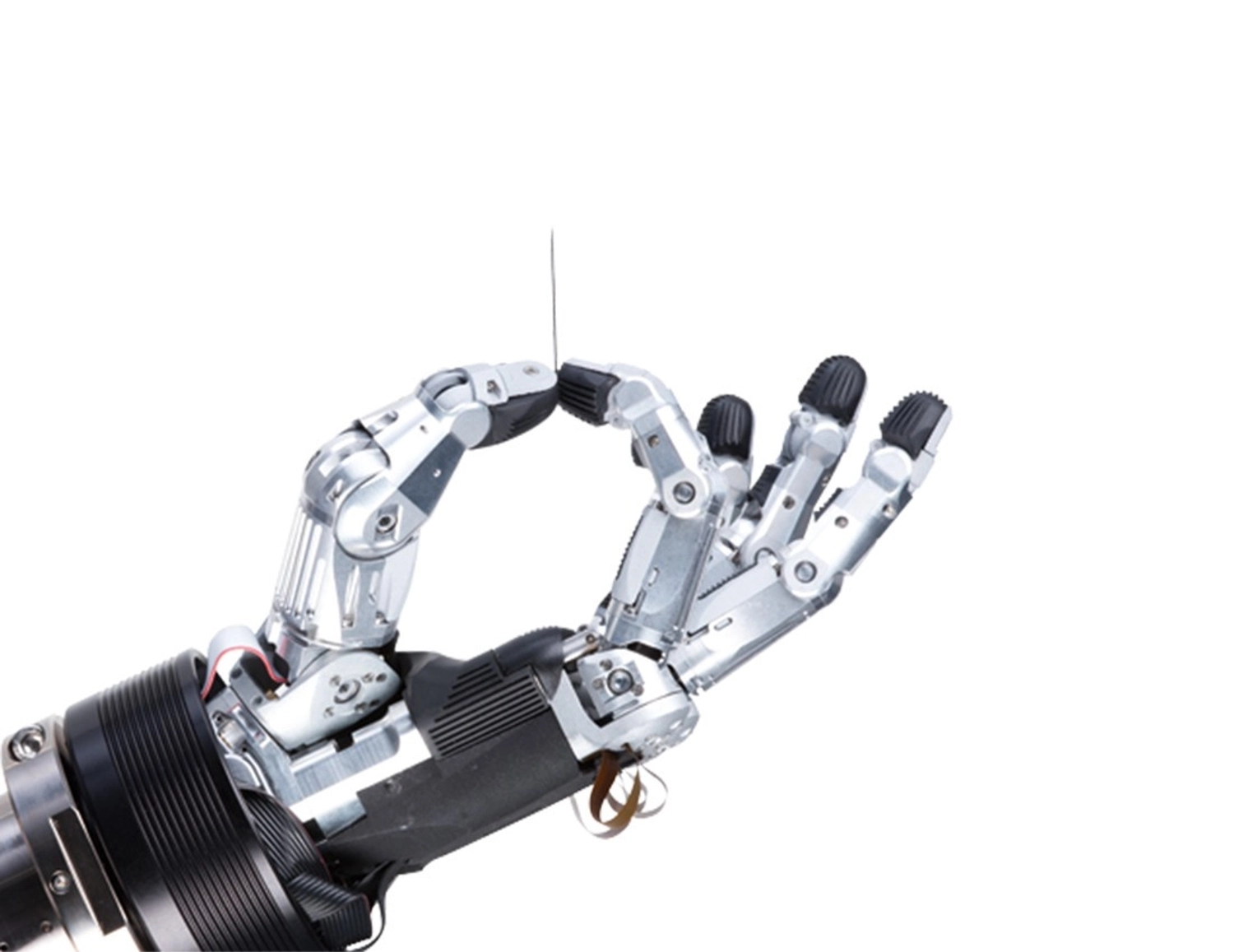
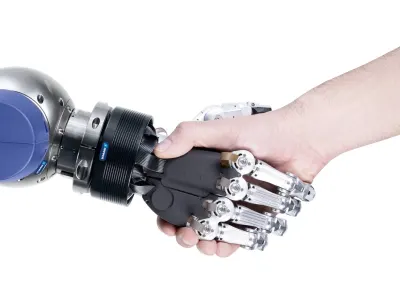
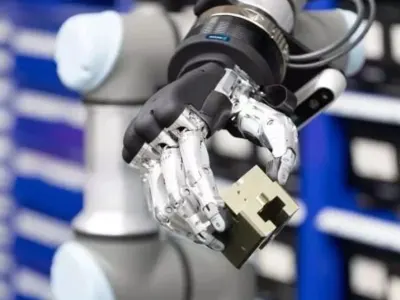
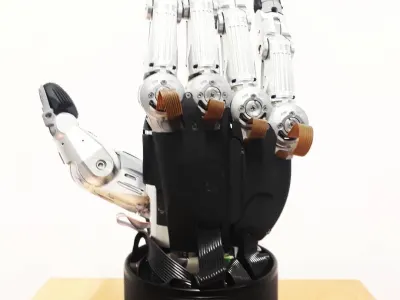
The Schunk SVH is a servo-electric 5-finger robotic hand designed to replicate human hand size, shape, and dexterity at a 1:1 ratio. Featuring 9 drives actuating 20 mechanically coupled joints (including passive DoF), it enables sensitive, adaptive grasping with elastic silicone fingertips for secure object handling in unstructured environments. Electronics, control, and power systems are fully integrated in the wrist for compact mobile use with lightweight robots.
Robot Specifications
Image Gallery
Below images are from Schunk's official sources





Review Videos
Watch expert reviews and demonstrations of this robot


Frequently Asked Questions
Get answers to common questions about this robot
Q1.What is the grip strength of the Schunk SVH humanoid robot hand?
The Schunk SVH has a grip strength of 4 kg, with elastic gripping surfaces ensuring reliable hold on objects through high sensitivity and friction.
Q2.How many fingers does the Schunk SVH have, and what are its degrees of freedom (DOF)?
The Schunk SVH features 5 fingers driven by 9 motors, providing 9 active degrees of freedom across 20 mechanically coupled joints for human-like dexterity; some sources note 16 DOF including passive joints and wrist movement.
Q3.What are the key specifications like weight, dimensions, and power requirements for the Schunk SVH?
It weighs 0.9 kg, measures approximately 50 × 50 × 50 cm (with max hand length around 218 mm per related designs), and operates on 24 V DC with low energy consumption via integrated electronics and RS-485 interface.
Q4.Is the Schunk SVH compatible with standard robot arms, and what interfaces does it use?
Yes, it offers defined interfaces for easy connection to market-standard industrial and lightweight robots, including a bottom-sided connection to the Schunk FWK change system via spring-loaded pins for communication and power; available in left and right hand versions.
Q5.What programming options and SDKs are available for the Schunk SVH?
It supports ROS with a dedicated driver for controlling all 9 active joints, enabling intuitive teach-in interfaces, trajectory interpolation, and synchronization with arms like the Schunk LWA 4P; full control and diagnosis are available via web interface.
Q6.What are common use cases for the Schunk SVH robotic hand?
Designed for adaptive grasping, precise manipulation, dexterous handling in unstructured environments, teleoperation, humanoid robot research, embodied AI, gesture-based human-robot communication, and simulation of human motions.
Q7.What maintenance is required for the Schunk SVH hand?
Maintenance details are not explicitly detailed in sources, but its compact design with integrated electronics, linkage-driven motors, and belt drives suggests routine checks on servo motors, elastic surfaces, and joints; suited for trained users only in research settings.
Q8.What safety features does the Schunk SVH include?
It provides high-sensitivity gripping with elastic, slip-resistant surfaces for secure object handling, compliant structure for natural contact, and precise control to mimic human dexterity, reducing risks in manipulation tasks; no tactile/force sensors listed.
Q9.What is the pricing for the Schunk SVH robotic hand?
The Schunk SVH is priced at approximately $30,000, though availability may be on backorder.
Q10.Does the Schunk SVH come in different versions or options?
Yes, it is available in left-hand and right-hand versions to replicate bilateral human activities, with fully integrated wrist electronics and options for combination with arms like LWA 4P.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.