Shadow Dexterous Hand
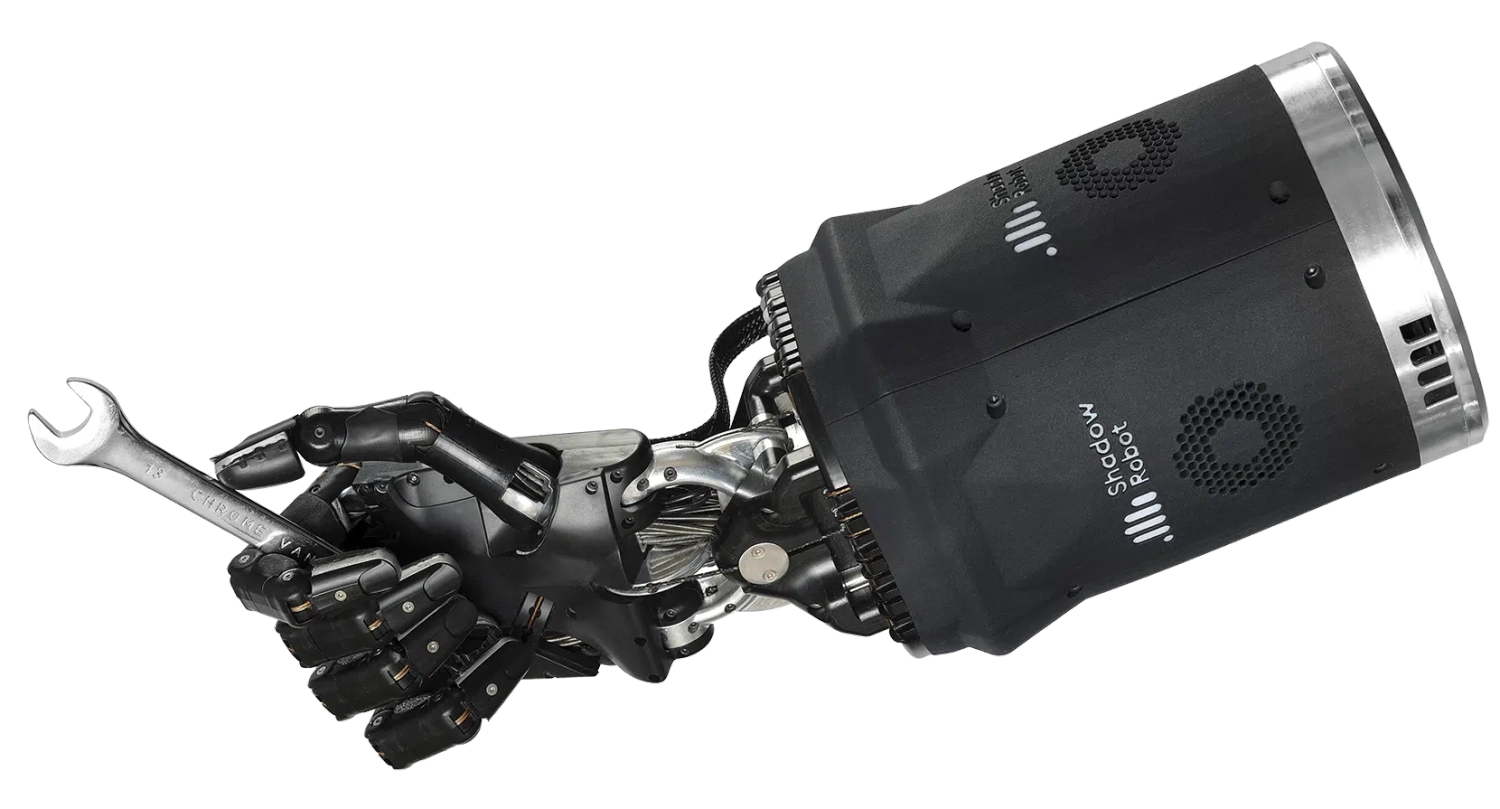
The Shadow Dexterous Hand is an advanced anthropomorphic robot hand designed to replicate human hand kinematics, dexterity, and force output with 24 movements (20 actuated DoF + 4 underactuated). Featuring forearm-mounted Smart Motors, 129 sensors for high-bandwidth feedback, and EtherCAT/ROS integration, it excels in precise manipulation for teleoperation, grasping research, and hazardous handling. Dimensions approximate human hand size, with full open-to-close in 0.5 seconds.
Robot Specifications
Image Gallery
Below images are from Shadow Robot Company's official sources








Review Videos
Watch expert reviews and demonstrations of this robot



More Robots from Shadow Robot Company
Explore other robots from this manufacturer
Frequently Asked Questions
Get answers to common questions about this robot
Q1.What are the degrees of freedom (DOF) and number of fingers in the Shadow Dexterous Hand?
The Shadow Dexterous Hand features **20 actuated degrees of freedom** with an additional 4 under-actuated movements for a total of **24 joints**, mimicking human hand kinematics across 5 fingers (4 fingers with 3 DOF each, thumb with 5 DOF, plus palm and wrist movements).
Q2.What is the grip strength and force control capability of the Shadow Dexterous Hand?
The hand provides force output comparable to the human hand through tendon force sensing on each of the 20 Smart Motor actuators, with integrated safety limits to prevent over-gripping; each Smart Motor monitors tendon forces and maintains them within defined limits.
Q3.What is the total number of sensors and what types are included?
It includes **129 sensors** total, comprising absolute position sensing for each joint, force sensing per actuator, tactile sensing on fingertips, motor current/voltage/temperature sensing, and optional BioTac sensors for detailed force, vibration, and temperature data—all accessible at 100Hz to 1kHz via EtherCAT.
Q4.Which robot arms or systems is the Shadow Dexterous Hand compatible with?
The hand is a self-contained system with full integration into **ROS (Robot Operating System)** via a high-bandwidth **EtherCAT** interface (100Mbps Ethernet-based), and supports modular construction for alternative setups; it's available through distributors like Clearpath Robotics.
Q5.What programming interfaces and SDKs are available for the Shadow Dexterous Hand?
It uses **EtherCAT** for high-frequency (up to 1kHz) sensor data and control, with **ROS** integration; Smart Motors provide local PID/torque/position control at 10kHz loops, and documentation includes technical specs for custom development.
Q6.What are the primary use cases for the Shadow Dexterous Hand?
Designed for **research in grasping/manipulation, neural control, brain-computer interfaces, industrial quality control, hazardous material handling, teleoperation/telepresence with haptic gloves, and deep-learning dexterous manipulation**.
Q7.What are the key maintenance requirements for the Shadow Dexterous Hand?
The electric Smart Motor system includes built-in **temperature management** to prevent overheating, tendon force monitoring for safety, and robust design for long training sessions; weight is 4-4.3kg total (hand, sensors, motors), with no specific routine maintenance detailed beyond spec checks.
Q8.What safety features does the Shadow Dexterous Hand include?
Safety is ensured by **Smart Motors** that monitor tendon forces to prevent over-gripping, limit movements within human-like ranges, manage motor temperatures, and provide compliant torque control; high-bandwidth sensing enables precise, safe operation up to 2Hz joint speeds.
Q9.What is the pricing for the Shadow Dexterous Hand?
Pricing ranges from **£50,000 to £90,000** depending on configuration, such as sensor options (e.g., BioTac) and model variants like C6M or Lite.
Q10.What are the physical specifications like size, weight, and speed of the Shadow Dexterous Hand?
Dimensions approximate a human hand (palm ~84-99mm wide/thick, forearm 208mm, overall ~13.5x44.8x13.5cm); weight is **4-4.3kg**; speeds reach **open-to-closed in 0.5s**, up to 2Hz full-range joint movement or 180°/s per joint.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.