
DLR-HIT Hand
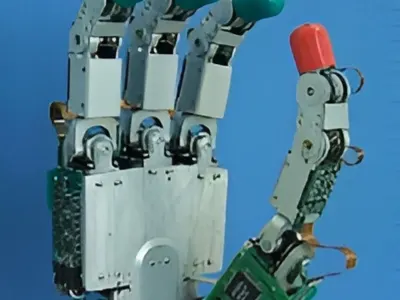
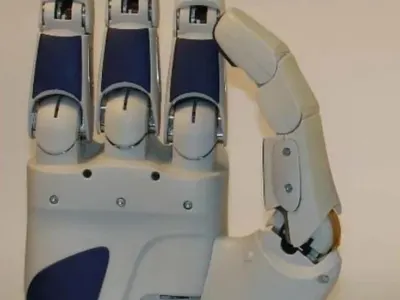
The DLR-HIT Hand, jointly developed by DLR and HIT based on DLR Hand II, features four identical fingers (one as opposing thumb) with four joints each, enabling human-like motor functions for fine manipulation and power grasping. It integrates brushless DC motors, joint torque/angle sensors, and FPGA-based communication in a compact design for medium-cost applications. Recognized worldwide as technologically leading, it mounts easily to robot arms with multisensory capabilities for dexterous tasks.
Robot Specifications
Image Gallery
Below images are from German Aerospace Center (DLR) & HIT's official sources


Review Videos
Watch expert reviews and demonstrations of this robot




More Robots from German Aerospace Center (DLR) & HIT
Explore other robots from this manufacturer

One Robot
Infinite Possibilities
One Robot
Infinite Possibilities

TP-01 by Raydiculous
Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is the humanoid robot hand DLR-HIT Hand, and what problem does it solve?
The DLR-HIT Hand is a multisensory robot hand jointly developed by the German Aerospace Center (DLR) and Harbin Institute of Technology (HIT), based on the DLR Hand II. It addresses challenges in dexterous manipulation for service robots by integrating advanced mechatronics at medium cost.
Q2. What are the main capabilities and key features of DLR-HIT Hand?
According to German Aerospace Center (DLR) & HIT, the hand features four fingers with four joints and three actuators each, plus an extra thumb degree of freedom for fine manipulation and power grasping. It includes joint angle and torque sensors, and uses brushless DC motors integrated into fingers and palm.
Q3. Which industries and use cases is DLR-HIT Hand built for?
The DLR-HIT Hand was developed for service robot applications, enabling tasks such as grasping and manipulation. German Aerospace Center (DLR) & HIT designed it to demonstrate multisensory capabilities in humanoid and robotic contexts.
Q4. What is the grip strength and dexterity of DLR-HIT Hand?
According to German Aerospace Center (DLR) & HIT specifications, the hand provides fingertip forces suitable for dexterous tasks, with each finger offering four joints and three degrees of freedom. The thumb adds an extra degree of freedom to support power grasping and fine manipulation.
Q5. Is DLR-HIT Hand compatible with standard robotic arms?
The design of the DLR-HIT Hand enables mounting to any robot arm due to the integration of drives and electronics in the fingers and palm. According to German Aerospace Center (DLR) & HIT, only three cables are needed for serial communication with an external CPU.
Q6. Does DLR-HIT Hand support tactile sensing or force feedback?
Each joint in the DLR-HIT Hand is equipped with contactless magnetic angle sensors and strain-gauge based torque sensors for force and position data. German Aerospace Center (DLR) & HIT implemented these for multisensory feedback in manipulation tasks.
Q7. What programming interfaces or SDKs are available for DLR-HIT Hand?
The hand is controlled via a Digital Signal Processor on a PCI board for commercial PCs, with a user-friendly interface displaying sensor data. According to German Aerospace Center (DLR) & HIT, it uses a high-speed serial bus and PC software for algorithm management.
Q8. How does DLR-HIT Hand compare to other robotic end-effectors?
The DLR-HIT Hand uses commercial components like brushless DC motors to approach production readiness from the research-focused DLR Hand II. German Aerospace Center (DLR) & HIT note it as a base for future multisensory hands, sold by Schunk as SAH for medium-cost applications.
Q9. What level of maintenance is required for DLR-HIT Hand?
The DLR-HIT Hand integrates all motors, electronics, and sensors compactly, using robust commercial actuators and contactless sensors. According to German Aerospace Center (DLR) & HIT, this design supports reliable operation with minimal exposed components.
Q10. Is DLR-HIT Hand currently available for commercial purchase?
The DLR-HIT Hand is marketed by Schunk under the name SAH, demonstrating its transition from research to application. German Aerospace Center (DLR) & HIT developed it as a close-to-production version for broader use.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.