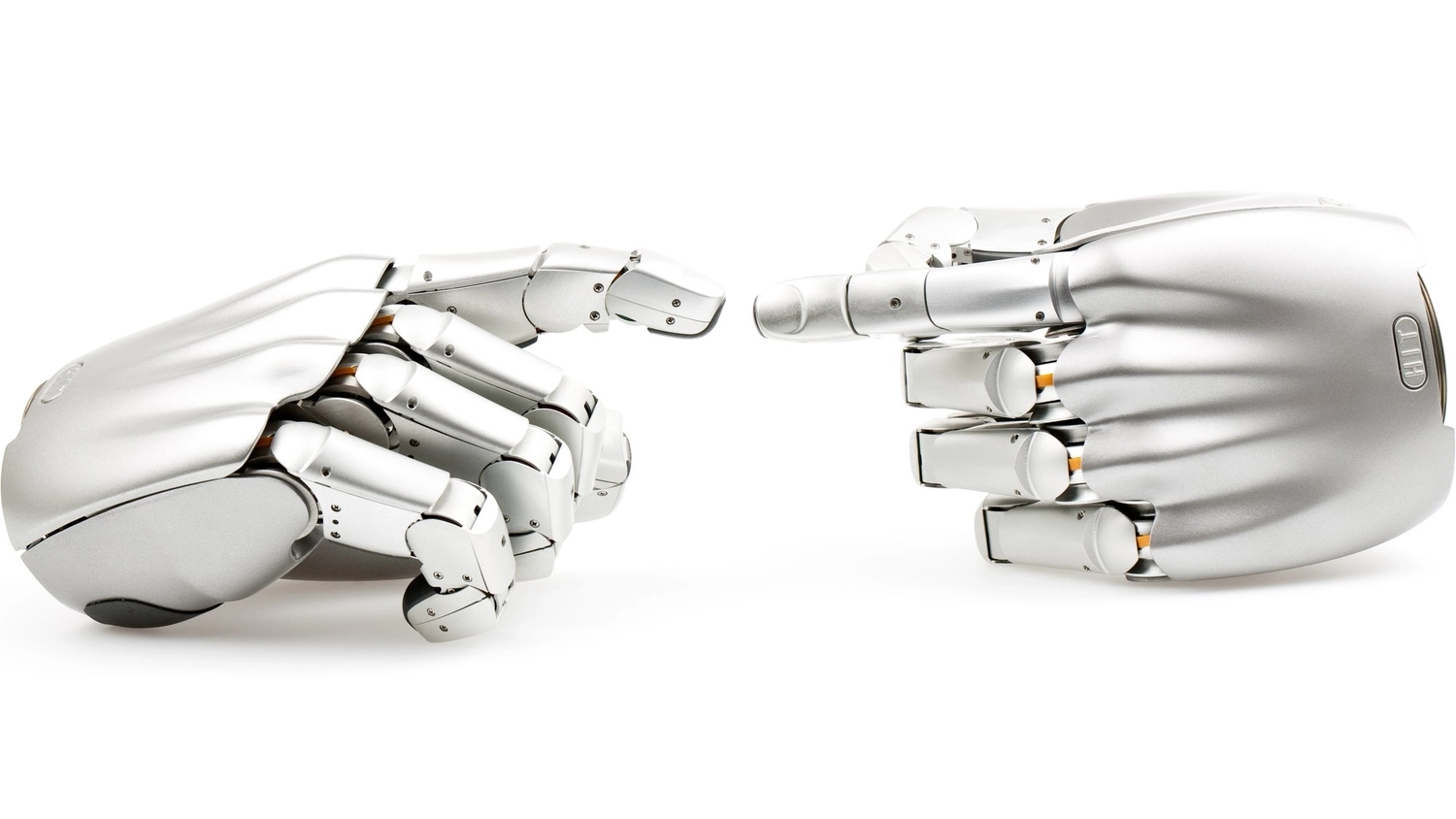
DLR-HIT Hand II
The DLR-HIT Hand II is a highly integrated, five-finger dexterous robot hand developed through a collaboration between DLR and HIT. It serves as a more compact, lighter, and more powerful successor to the DLR-HIT Hand I. Each of its five modular fingers features four joints and three active degrees of freedom, with all actuators, high-speed communication electronics, and multisensory systems integrated directly into the finger and palm. This design allows for complex telemanipulation and autonomous grasping, famously winning the IF-Product Design Award in 2009 for its seamless mechanical integration.
Robot Specifications
Image Gallery
Below images are from German Aerospace Center (DLR) & HIT's official sources




Review Videos
Watch expert reviews and demonstrations of this robot


More Robots from German Aerospace Center (DLR) & HIT
Explore other robots from this manufacturer

One Robot
Infinite Possibilities
One Robot
Infinite Possibilities

TP-01 by Raydiculous
Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is the humanoid robot hand DLR-HIT Hand II, and what problem does it solve?
The DLR-HIT Hand II is a dexterous robotic hand developed jointly by the German Aerospace Center (DLR) and Harbin Institute of Technology (HIT). It addresses the need for anthropomorphic manipulation systems capable of performing complex grasping and fine manipulation tasks in environments requiring human-like dexterity, such as space operations and service robotics applications.
Q2. What are the main capabilities and key features of DLR-HIT Hand II?
The hand features five modular fingers with integrated actuation, sensing, and communication electronics. Each finger contains four joints with three active degrees of freedom. The system incorporates position sensors, force and torque sensors, and temperature monitoring. Sensor electronics are located directly beside the sensors to minimize signal degradation and reduce cabling requirements to only 12 lines.
Q3. Which industries and use cases is DLR-HIT Hand II built for?
The DLR-HIT Hand II is designed for space operations, telemanipulation tasks, and service robotics applications. Documented use cases include grasping objects in space environments through the Space Justin platform, opening and closing doors and drawers, operating devices, and using tools. The system supports shared autonomy for remote human operators.
Q4. What is the grip strength and dexterity of DLR-HIT Hand II?
According to German Aerospace Center (DLR) and HIT, the hand provides 10 Newtons of active fingertip force. The system achieves joint velocities up to 360 degrees per second. With 15 total degrees of freedom distributed across five fingers, the hand is designed to perform both stable grasping and fine manipulation tasks.
Q5. Is DLR-HIT Hand II compatible with standard robotic arms?
The DLR-HIT Hand II integrates complete actuation, sensor, and communication electronics within the hand structure, allowing flexible interfacing to different robotic platforms. The hand has been integrated with the Space Justin telemanipulation system and is designed as a modular end-effector for various robotic configurations.
Q6. Does DLR-HIT Hand II support tactile sensing or force feedback?
Yes, the DLR-HIT Hand II incorporates multisensory capabilities including force and torque sensors at each fingertip. The system includes a 6-DOF fingertip force-torque sensor design and temperature sensors. These integrated sensors enable force feedback and tactile awareness for manipulation tasks.
Q7. What programming interfaces or SDKs are available for DLR-HIT Hand II?
The DLR-HIT Hand II supports multiple communication protocols including PPSeCo, CAN, and Internet connectivity. The hand's integrated electronics and reduced cabling architecture facilitate communication with external systems. Research has demonstrated simulation models using MATLAB and CoppeliaSim for control system verification and 3D simulation.
Q8. How does DLR-HIT Hand II compare to other robotic end-effectors?
The DLR-HIT Hand II represents the second generation of multisensory hand design at DLR, building on the DLR Hand I. Compared to its predecessor, the DLR-HIT Hand II is lighter and smaller while maintaining five modular fingers. The hand was awarded the IF-Design-Award in 2009, recognizing its design approach.
Q9. What level of maintenance is required for DLR-HIT Hand II?
The search results do not provide specific information regarding maintenance requirements, service intervals, or component replacement procedures for the DLR-HIT Hand II. Inquiries regarding maintenance protocols should be directed to German Aerospace Center (DLR) or HIT directly.
Q10. Is DLR-HIT Hand II currently available for commercial purchase?
The DLR-HIT Hand II is primarily deployed as a research and development platform integrated with systems such as Space Justin. The search results do not indicate general commercial availability. Availability and licensing inquiries should be directed to German Aerospace Center (DLR) or Harbin Institute of Technology (HIT).
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.