
IH2 Azzurra Hand
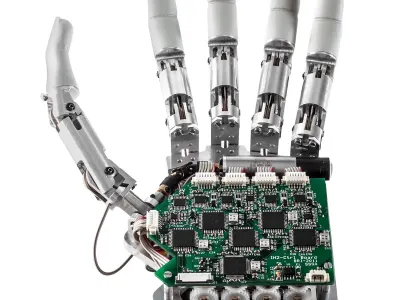
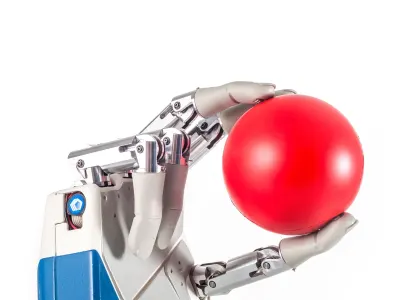
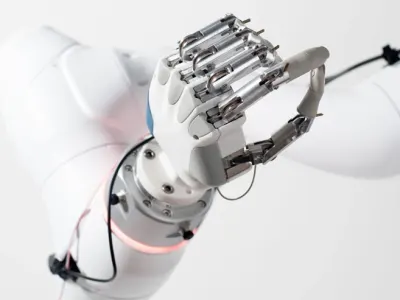
The IH2 Azzurra is a self-contained, human-sized anthropomorphic robotic hand with underactuated fingers, embedding actuators, sensors, and control electronics in its palm and fingers. It supports versatile grasping (cylindrical, lateral, precision) via 5/11 degrees of actuation/freedom, integrated force/position sensors for object detection, and is lightweight at 640g for research in prosthetics, neuroscience, human-robot interaction, and humanoid robotics.
Robot Specifications
Image Gallery
Below images are from Prensilia's official sources




Review Videos
Watch expert reviews and demonstrations of this robot




More Robots from Prensilia
Explore other robots from this manufacturer

One Robot
Infinite Possibilities
One Robot
Infinite Possibilities

TP-01 by Raydiculous
Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is the humanoid robot hand IH2 Azzurra Hand, and what problem does it solve?
The IH2 Azzurra is a self-contained, human-sized anthropomorphic robotic hand manufactured by Prensilia, an Italian robotics company. It addresses the need for lightweight, dexterous end-effectors capable of adaptive grasping and object manipulation in research and collaborative robotics applications. The hand integrates actuators, control electronics, and sensors within a compact form factor weighing 640 grams.
Q2. What are the main capabilities and key features of IH2 Azzurra Hand?
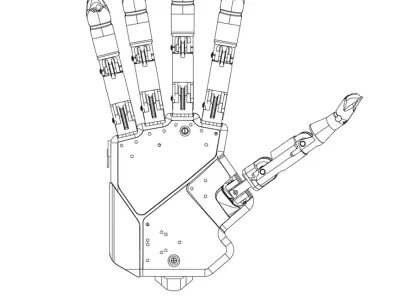
The hand features five fingers with underactuated, self-adaptive digits that conform to object geometry during grasping. It includes embedded force and position sensors, ten configurable preset grasp patterns, and the ability to perform button pressing and object counting tasks. The design incorporates tendon-driven actuation via Bowden cable transmission with manually adjustable finger stiffness, and all components are fully integrated into the palm and finger structure.
Q3. Which industries and use cases is IH2 Azzurra Hand built for?
According to Prensilia, the hand is designed for humanoid robotics research, biorobotics applications, human-robot interaction studies, ergonomics research, and control algorithm development. It is also intended as a collaborative end-effector for robotic arms with limited payload capacity and as a platform for testing human-machine interfaces including EMG, ENG, and EEG-based control systems.
Q4. What is the grip strength and dexterity of IH2 Azzurra Hand?
The hand achieves a cylindrical power grasp force of 35 Newtons and a lateral grip force of approximately 7 Newtons. It can lift objects up to 5 kilograms and features five actuated axes providing eleven total degrees of freedom. The ring and little fingers operate via a coupled adaptive grasping mechanism, while the thumb, index, and middle fingers have independent flexion and extension control.
Q5. Is IH2 Azzurra Hand compatible with standard robotic arms?
The hand features an M8 thread mechanical interface designed for integration with robotic arms and other platforms. Its lightweight design at 640 grams makes it suitable for collaborative robotic arms with limited payload capacity. Communication occurs through standard interfaces including RS-232, USB, and Bluetooth connectivity.
Q6. Does IH2 Azzurra Hand support tactile sensing or force feedback?
Yes, the hand includes four analog force sensors located on the thumb, index, middle fingers, and ring-little finger group, each with approximately 200 millinewton resolution. It also incorporates five digital position sensors with 1000 pulses per degree resolution and ten limit switches. An embedded CPU operates PID controllers for position, current, and force feedback at 1 kilohertz with sensor reading delays below 1 millisecond.
Q7. What programming interfaces or SDKs are available for IH2 Azzurra Hand?
The hand communicates via a three-wire communication bus based on RS-232 protocol, accessible through USB or Bluetooth interfaces. Prensilia provides software documentation and support materials for developers. The embedded CPU with real-time servo-control loops enables direct integration with external control systems and microcontroller-based applications.
Q8. How does IH2 Azzurra Hand compare to other robotic end-effectors?
The IH2 Azzurra is positioned among the lightest research-grade anthropomorphic hands at 640 grams while maintaining human-like proportions and a high degree-of-freedom count. Its underactuated finger design provides adaptive grasping without requiring individual motor control for each joint, distinguishing it from fully actuated alternatives that demand greater computational overhead.
Q9. What level of maintenance is required for IH2 Azzurra Hand?
The search results do not provide specific maintenance requirements or service intervals for the IH2 Azzurra. The non-backdrivable tendon-driven design ensures grip stability without power, potentially reducing wear during idle periods. Users should consult Prensilia's technical documentation for detailed maintenance protocols.
Q10. Is IH2 Azzurra Hand currently available for commercial purchase?
The IH2 Azzurra is available for purchase through authorized distributors, though availability may vary. According to product listings, the hand is offered at a price point of approximately 5,300 units of currency. Interested parties should contact Prensilia or authorized resellers for current stock status and delivery timelines.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.