
Mia Hand
The Mia Hand is a highly dexterous, 5-finger anthropomorphic robotic hand developed by Prensilia, initially as a myoelectric prosthesis winner of the 2019 Red Dot Award and 2022 Compasso d’Oro. It features underactuated design with 3-4 degrees of freedom, embedded sensors, and PID control for human-like grasping in 80% of daily activities. Versatile for humanoid robotics, industrial automation, and research, it supports multiple grasp types with up to 140N force in a compact, customizable form.
Robot Specifications
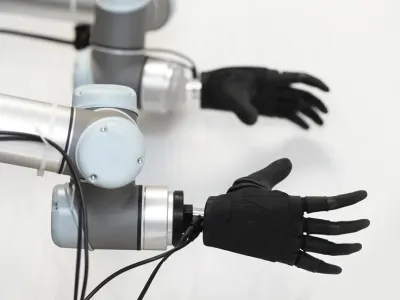
Image Gallery
Below images are from Prensilia's official sources







Review Videos
Watch expert reviews and demonstrations of this robot




More Robots from Prensilia
Explore other robots from this manufacturer

One Robot
Infinite Possibilities
One Robot
Infinite Possibilities

TP-01 by Raydiculous
Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is the humanoid robot hand Mia Hand, and what problem does it solve?
Mia Hand is a five-fingered anthropomorphic robotic end-effector developed by Prensilia, a company based in Tuscany, Italy. According to Prensilia, it addresses challenges in grasping objects designed for humans in robotics research, prosthetics, and industrial applications by enabling power, precision, and lateral grasps.
Q2. What are the main capabilities and key features of Mia Hand?
Mia Hand features three motors for degrees of actuation controlling thumb flexion/extension, index finger flexion, and coupled finger movements. It includes motor encoders, current sensors, limit switches, and optional force sensors on select fingers for position, speed, and force control via PID controllers.
Q3. Which industries and use cases is Mia Hand built for?
Mia Hand is designed for humanoid robotics, industrial automation, prosthetics, ergonomics, human-machine interfaces, and research in artificial intelligence, neuroscience, and human-robot interaction. Prensilia states it supports grasping in flexible manufacturing and bio-automation scenarios.
Q4. What is the grip strength and dexterity of Mia Hand?
According to Prensilia, Mia Hand provides grasp forces ranging from 44 to 140 N with a closing time under 0.4 seconds. Its dexterity stems from three degrees of actuation enabling independent thumb and index control plus coupled middle, ring, and little finger flexion for multiple grasp types.
Q5. Is Mia Hand compatible with standard robotic arms?
Mia Hand offers mechanical interfaces such as ISO 9409-1-50-4-M6 for industrial versions and EQD for prosthetic use. Prensilia notes compatibility with arms from manufacturers including UR, Franka, KUKA, and Ottobock on request, using UART over USB communication.
Q6. Does Mia Hand support tactile sensing or force feedback?
Mia Hand includes three bi-axial force sensors on the thumb, index, and middle fingers (availability varies by model) alongside motor current sensors for grasping force measurement. These enable force control through embedded PID controllers operating at 1 kHz.
Q7. What programming interfaces or SDKs are available for Mia Hand?
Mia Hand uses a UART or RS485 serial communication protocol for real-time control of motors and sensors, with predefined grasp routines and non-volatile memory for parameters. ROS packages, including mia_hand_ros_pkgs and Gazebo simulation support, are available for integration.
Q8. How does Mia Hand compare to other robotic end-effectors?
Prensilia describes Mia Hand as a self-contained unit with embedded actuators, sensors, and electronics in a lightweight design under 520 g, balancing dexterity and strength for human-like grasps. It differs from simpler grippers by offering multiple predefined grasps covering 80% of daily living activities.
Q9. What level of maintenance is required for Mia Hand?
Prensilia indicates Mia Hand's robustness suits unsupervised scenarios and longitudinal studies due to its fully embedded design. Maintenance involves standard checks on motors, sensors, and electrical connections as outlined in the user manual, with no specific intervals detailed.
Q10. Is Mia Hand currently available for commercial purchase?
Mia Hand is offered in variants including research, industrial, and prosthetic models through Prensilia. The company provides user guides and data sheets for setup, indicating commercial availability for research institutions, industry, and medical applications.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.