UBTECH's Walker S1 Redefines Industrial Robot Deployment Standards
Robot Details
Walker S1 • UBTECH RoboticsPublished
December 10, 2025
Reading Time
4 min read
Author
Origin Of Bots

Mass Production Accelerates Commercial Robotics Era
UBTECH Robotics has crossed a critical manufacturing threshold with Walker S1, transitioning from research prototypes to scaled industrial deployment. The company announced plans in January 2025 to produce between 500 and 1,000 units by year-end, marking a watershed moment for humanoid robotics commercialization. Research versions command price tags between $500,000 and $960,000, while commercial deployments are projected to drop to $30,000-$100,000 ranges, fundamentally reshaping economics for enterprises considering robotic workforce integration. This pricing trajectory signals that industrial humanoids are transitioning from specialized research tools into accessible manufacturing assets.
Intention Recognition Powers Autonomous Decision-Making
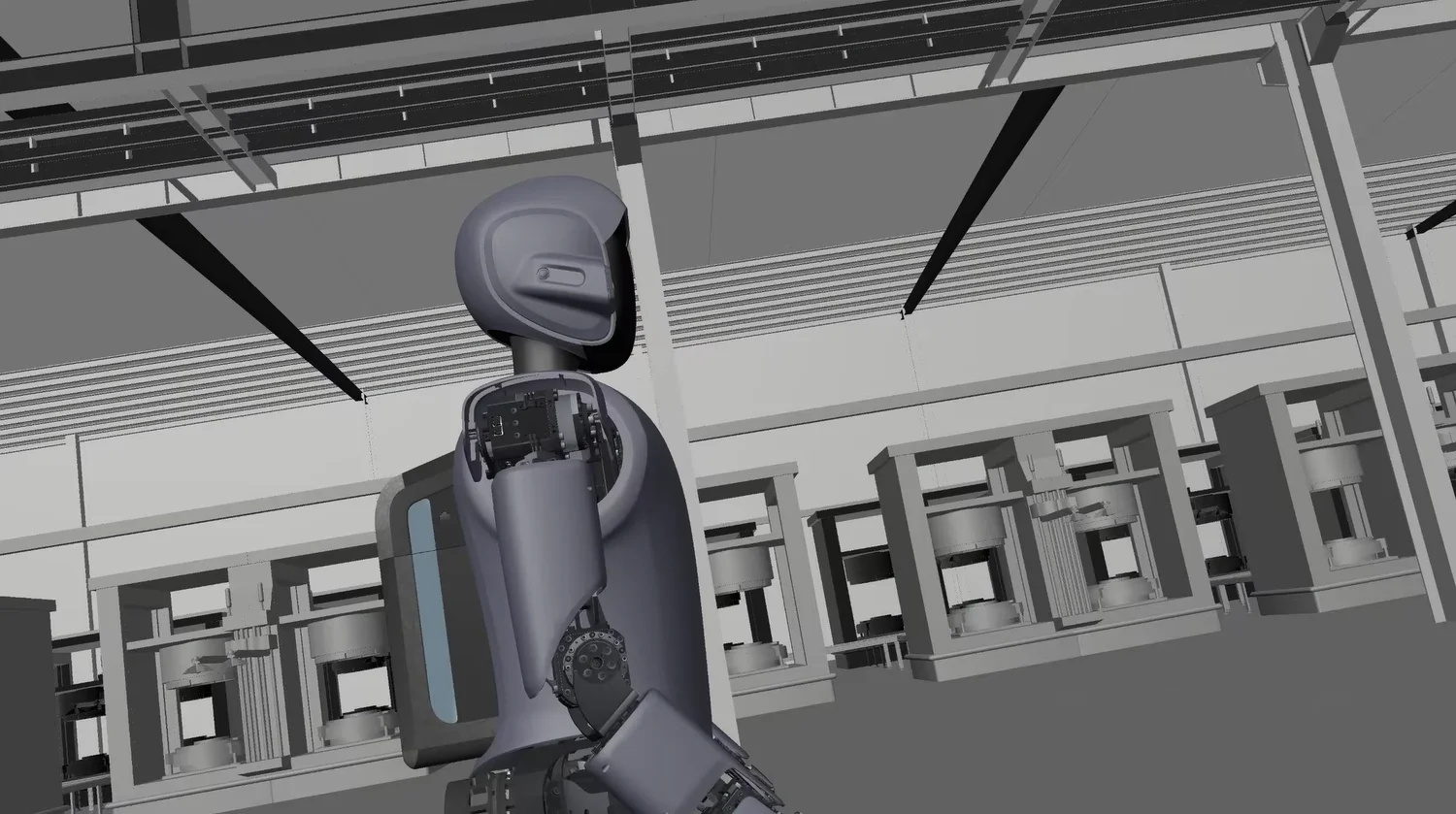
Walker S1 distinguishes itself through advanced large language model integration that enables genuine task comprehension rather than mere instruction execution. The robot processes semantic understanding of complex assignments, decomposing multi-step industrial workflows into executable sequences without constant human intervention. Its semantic visual simultaneous localization and mapping system couples perception with spatial reasoning, allowing the machine to navigate factory floors while simultaneously understanding environmental context. This cognitive layer transforms Walker S1 from a choreographed performer into an adaptive problem-solver capable of handling unforeseen complications within structured industrial environments.
Learning-Based Motion Architecture Solves Industrial Friction
The engineering breakthrough centers on an end-to-end learning framework that integrates perception directly with motion control, eliminating traditional lag between sensory input and physical response. UBTECH's whole-body motion control system addresses three persistent industrial bottlenecks: visual positioning inconsistencies under variable lighting, motion algorithm failures under dynamic loading, and thermal management during sustained high-intensity operations. The robot's adaptive motion control enables stable traversal across uneven terrain and complex factory environments while maintaining millimeter-level precision during manipulation tasks, capabilities previously requiring separate specialized equipment.
From Quality Control to Logistics Orchestration
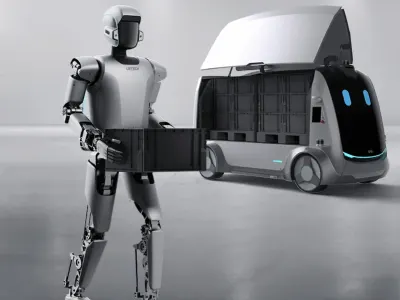
Walker S1 has already infiltrated production environments where it performs tasks previously considered too hazardous or tedious for human workers. At Audi's Changchun facility, the robot conducts air-conditioning system leak inspections—work that exposed human technicians to respiratory risks. Beyond quality assurance, Walker S1 handles material sorting, crate transport, component assembly, and precision inspections of automotive components with accuracy exceeding 99 percent. Zeekr's 5G smart factory deployment demonstrates fleet-scale coordination, where multiple Walker S1 units synchronize through UBTECH's BrainNet framework to optimize production line efficiency in real-time.

Muscular Specifications Meet Industrial Demands
Standing 170 centimeters tall and weighing between 50-80 kilograms, Walker S1 achieves walking speeds of 1.5-3 meters per second while maintaining carrying capacity of 15-25 kilograms per arm without balance degradation. The platform integrates 36 high-performance servo joints powered by a 3-5 kWh, 48-volt lithium polymer battery system supporting 3-5 hour operational cycles with 2-4 hour recharge windows. Its sensory architecture encompasses RGB cameras, depth sensors, LiDAR mapping, inertial measurement units, force/torque feedback, gyroscopes, accelerometers, and joint encoders—creating comprehensive environmental awareness. The robot operates via Linux-based systems with ROS 2 compatibility and Python SDK support, enabling developers to customize behaviors across manufacturing, research, logistics, and infrastructure inspection domains.
Competitive Positioning Against Emerging Rivals
Walker S1 occupies a distinct competitive niche against emerging humanoid platforms. Compared to KUAVO-MY and D7 models, Walker S1 excels in industrial hardening and thermal management for sustained operations, though some competitors offer superior arm dexterity. Against AgiBot X2-N, Walker S1 demonstrates stronger bipedal stability and larger payload capacity, but X2-N provides faster deployment cycles for certain research applications. Astribot S1 matches Walker S1's manipulation precision, yet Walker S1's advantage lies in proven factory floor integration and fleet coordination capabilities through BrainNet. The trade-off remains between raw dexterity versus industrial reliability—Walker S1 prioritizes the latter.



Humanoid Robotics Enters Mainstream Manufacturing
Walker S1's trajectory signals that humanoid robots have transitioned from speculative technology into operational manufacturing infrastructure. Mass production timelines and aggressive pricing suggest that within 24-36 months, humanoid deployments could become standard rather than exceptional across automotive, electronics, and logistics sectors. UBTECH's success with multi-robot coordination frameworks indicates that future factories won't deploy isolated robots but rather coordinated swarms executing complex, interdependent tasks. This inflection point challenges workforce planning assumptions across industries and accelerates the timeline for human-robot collaboration protocols that manufacturing executives must now treat as immediate strategic priorities rather than distant considerations.
Related Articles

XMAN-F1 Partners Johnnie Walker, M104 for AI Bartending Breakthrough

RobotEra L7 Racing Into Warehouses: 14.4 km/h Humanoid Cuts Picking Costs with ERA‑42 Deal

Clone’s Protoclone V1 Mirrors Human Muscles with 1,000 Myofibers, 500 Sensors

Samsung Bot Handy 2 Integrates Google Gemini, Boosts Dexterity with 3kg Dual-Arm Grip
Related Comparisons
Compare Walker S1 with similar robots
Walker S1 vs Kaleido 8.0
Compare Walker S1 and Kaleido 8.0. Detailed analysis of navigation, battery, sensors, and mobility.

Walker S1 vs AgiBot G2
Walker S1 or AgiBot G2? Compare specs, sensors, navigation, speed, and real-world performance.

Walker S1 vs Walker Tienkung
Walker S1 or Walker Tienkung? Compare specs, navigation, sensors, and mobility performance.

Walker S1 vs Elf-Xuan 2.0
Head-to-head: Walker S1 vs Elf-Xuan 2.0. Explore differences in navigation, battery life, and sensors.
Learn More About This Robot
Discover detailed specifications, reviews, and comparisons for Walker S1.
View Robot Details →