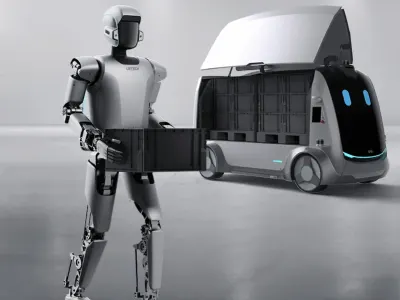
AgiBot G2 by AgiBot is presented here as a versatile industrial humanoid targeting precision manufacturing and collaborative industrial tasks; it is being compared to highlight its positioning as a high‑precision, sensor‑rich platform for factory and logistics environments and to show how its broader sensor suite and proprietary AI OS distinguish it from other AgiBot humanoids. Key differentiators for the AgiBot G2 include a 175 cm humanoid form factor, extensive torque and force sensing, a 360‑degree spatial perception system, and proprietary AI software that supports reinforcement learning and simulation, making it suited for precision production and guided‑tour or collaborative roles.
AgiBot X2-N by AgiBot is included as the comparative right‑side platform because it represents an alternative humanoid configuration from the same manufacturer emphasizing proprioceptive control and mission‑focused autonomy for logistics and dynamic environments. The AgiBot X2‑N shares the 175 cm height and 55 kg mass but differs by relying primarily on internal proprioceptive sensors for navigation and gait adjustment, using a Linux/ROS software stack and targeting logistics, search‑and‑rescue, and industrial automation scenarios.
Detailed Analysis

Design & Build Quality
Both robots use a humanoid form with a 175 cm height and a nominal 55 kg mass, indicating similar overall scale and payload footprint; the G2 notes typical humanoid proportions (~50 cm width, ~40 cm depth) while the X2‑N’s typical proportions list ~50 cm width and ~80 cm length in the provided data, reflecting slightly different body‑depth assumptions. The G2 description emphasizes high‑precision torque sensors and a spatial perception exterior that implies a design optimized for interaction with external environment and tooling, whereas the X2‑N emphasizes proprioceptive components (joint torque, pressure, internal gyros) integrated for internal state sensing and gait control. Both designs include safety features such as emergency stop and real‑time force sensing, indicating comparable hardware safety integration. Weight parity (55 kg) suggests similar structural materials and powertrain sizing between models.

Mobility & Navigation
Both units report a top speed of approximately 7 km/h, indicating comparable locomotion hardware and actuator performance. AgiBot G2 lists advanced spatial perception and likely SLAM‑based navigation with obstacle avoidance, enabling environment mapping and external sensor‑based path planning, while AgiBot X2‑N relies on proprioceptive feedback and lacks cameras, GPS, or LiDAR per provided notes, indicating navigation through internal state estimation and reactive gait adjustment rather than map‑based SLAM. The X2‑N’s approach favors environments where internal stability and gait adaptation are essential (uneven terrain, dynamic obstacles), and the G2’s external sensing favors structured or mixed human environments requiring explicit obstacle detection and scene understanding. Both include real‑time control systems to maintain stability and respond to obstacles.

Sensors & Perception
AgiBot G2 includes high‑precision torque sensors, a 360‑degree spatial perception system, cameras, force sensors and environmental sensors, indicating a broad external sensing suite for vision and scene understanding. In contrast, AgiBot X2‑N is described as having primarily proprioceptive sensors — joint torque, pressure, and internal gyros — and explicitly notes the absence of cameras or external sensors, which limits external scene perception but strengthens internal state awareness and joint‑level control. The G2’s external sensors support tasks requiring object recognition, guided tours, and collaborative work with humans, while the X2‑N’s sensor set supports robust locomotion and gait control where external sensing is unnecessary or undesirable. Sensor differences imply different software and data‑processing demands: vision/SLAM pipelines on G2 versus high‑frequency proprioceptive control loops on X2‑N.

AI Capabilities
AgiBot G2 is reported to use a proprietary AI OS, likely Linux‑based, with support for reinforcement learning and simulation, indicating capabilities for advanced autonomy, learning in simulation, and integration of multimodal inputs including voice. AgiBot X2‑N is described as Linux/ROS‑based with AI autonomous and real‑time control systems, suggesting a more open robotics middleware approach emphasizing deterministic control and integration with ROS tooling. G2’s software emphasis on proprietary AI and reinforcement learning aligns with tasks requiring perception‑driven decision making and continual improvement, while X2‑N’s ROS focus supports interoperability, modular algorithm deployment, and field customization for logistics or rescue operators.

Battery & Power Efficiency
Battery details for AgiBot G2 are not specified beyond an estimated lifecycle of 3–5 years typical for industrial lithium batteries, implying long‑term battery service life but unspecified runtime characteristics. AgiBot X2‑N specifies a 3–5 year battery life estimate and lists battery as 3–5 years in the provided dataset, indicating similar expected pack longevity between models but without consistent runtime or capacity numbers. The lack of explicit runtime/pack capacity for G2 versus X2‑N means operational endurance and charging cadence cannot be directly compared from available data. Both platforms therefore require customer validation of runtime (hours per charge) and battery management specifics prior to deployment.
Use-Case Suitability
AgiBot G2 is positioned for auto parts production, precision manufacturing, logistics sorting, guided tours, and collaborative industrial tasks where external perception, fine force control, and integration with manufacturing workflows are required. AgiBot X2‑N is positioned for logistics, search‑and‑rescue, industrial automation, and dynamic environment navigation where robust proprioceptive gait control and real‑time adjustments are prioritized. The G2’s sensor and software suite favors tasks involving object interaction and human environments, while the X2‑N’s sensor and control focus favors locomotion resilience and operations in situations where external sensors may be limited or intentionally omitted.
Safety Features
Both robots include emergency stop capability and real‑time force sensing to reduce collision forces and allow rapid shutdown, with impedance control listed for the G2 and real‑time gait adjustment for the X2‑N, indicating active safety strategies tied to their sensor suites. G2’s obstacle avoidance and impedance control rely on external sensing and force feedback to modulate interactions, while X2‑N’s obstacle avoidance is implemented via proprioception and rapid gait adaptation without external vision. Both approaches provide safety mechanisms appropriate to their sensing philosophies and intended operational environments.
Software Ecosystem
AgiBot G2 is described as running a proprietary AI OS that is likely Linux‑based and supports reinforcement learning and simulation workflows, suggesting a closed but task‑oriented software stack optimized by the manufacturer. AgiBot X2‑N is explicitly Linux/ROS‑based, indicating compatibility with ROS tools, community packages, and easier third‑party integration for custom autonomy or fleet management. The G2’s proprietary stack may provide turnkey features optimized for manufacturing, while the X2‑N’s ROS orientation supports customization and integration into existing robotics infrastructures.
Analysis Score Summary
Total Score
8
AgiBot G2
VS
Based on Detailed Analysis
Total Score
8
AgiBot X2-N
📊 Win: 2 points | Trade-off: 1 point each
Scores are summed across every insight: a clear winner earns 2 points, while balanced trade-offs give each robot 1 point. The total reflects how often each robot outperforms the other (or shares the spotlight) throughout the detailed analysis sections.
Technical Specifications
Head-to-head performance data and metrics
| Specification | Model AAgiBot G2 | Model BAgiBot X2-N |
|---|---|---|
Functional Utility & Use Cases4 Comparative Metrics | ||
Control Method | AI autonomous, remote teleoperation, multimodal voice interaction | AI autonomous, real-time control systems |
Use Cases | Precision assembly, interactive HRI, guided tours, high-mix production, logistics sorting | Logistics/Warehouse Sorting, Security Patrol, Healthcare/Elderly Care, Research & Education, and Commercial Entertainment |
Multi Robot Coord | Yes | (Inferred · Medium confidence · Typical for industrial fleets) | Supported via Swarm Control Planning |
Pet Friendly | Yes (Professional spatial awareness) | Yes (Equipped with proactive obstacle avoidance) |
Manipulation & Load Capacity4 Comparative Metrics | ||
Carrying Capacity | 5 kg per arm | 5.4 kg (single arm) |
Deadlift Capacity | 5 kg | (Inferred · High confidence · Based on AgiBot's G2 arm rated payload specs) | 15 kg (based on 120N.m peak joint torque) |
Payload Type | Packages, tools, industrial components | Packages, tools, cargo |
Modular Attachments | Grippers, sensors, possibly custom end-effectors | OmniHand Dexterous Hands (5-finger), 3-finger Grippers, and Tool-specific end effectors |
Kinematic Architecture & Dexterity4 Comparative Metrics | ||
Degrees of Freedom | 26 (expandable to 50) | 28 – 31 DOF (Depends on configuration) |
Material | Aluminum frame, automotive-grade composites | High-strength Aluminum, Carbon Fiber, and Impact-resistant TPU Foam |
Mobility Type | Wheeled (Omnidirectional) | Hybrid (bipedal walking and wheeled) |
Hardware Interface | USB, Ethernet, GPIO (typical for industrial robots) | USB, Ethernet, GPIO |
Functional Utility & Use Cases
4 Comparative Metrics
Manipulation & Load Capacity
4 Comparative Metrics
Kinematic Architecture & Dexterity
4 Comparative Metrics
Related Comparisons
Discover similar robot matchups to expand your knowledge and find the perfect solution


AgiBot G2 vs Green
Head-to-head: AgiBot G2 vs Green. Explore differences in navigation, sensors, and battery.

AgiBot G2 vs D7
Compare AgiBot G2 and D7. Detailed analysis of navigation, battery, and sensors.
Walker S1 vs AgiBot G2
Walker S1 or AgiBot G2? Compare specs, sensors, navigation, speed, and real-world performance.

AgiBot X2-N vs Zerith Z1
Which robot wins? AgiBot X2-N vs Zerith Z1 compared across navigation, sensors, and battery.
Disclaimer
All content, comparisons, and verdicts on this website are based on our research, testing, and opinion. While we strive for accuracy, we do not guarantee the completeness, reliability, or suitability of any information. Performance, specifications, and results may vary depending on usage and conditions. This website and its authors are not responsible for any decisions, actions, or outcomes based on the information provided. Always verify product details with the manufacturer before making purchase or operational decisions.