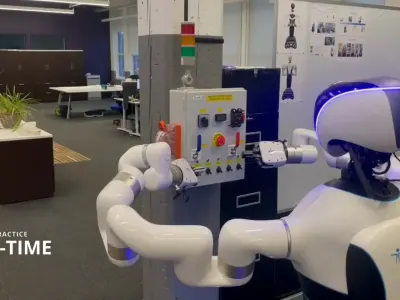
The MH3 by Mirsee Robotics is positioned for advanced humanoid applications in manufacturing and hazardous environments. It features superior navigation with LiDAR mapping alongside visual and indoor SLAM, enabling precise localization. Control options include teleoperation via immersive VR with haptic feedback, autonomous task programming, and learned behaviors, distinguishing it from simpler systems. Dimensions measure 170 x 50 x 40 cm with a weight of 75 kg.
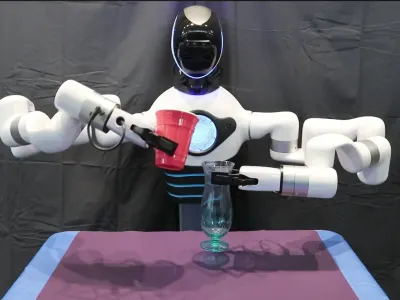
The MH2 by Mirsee Robotics targets industrial assembly and remote inspection tasks within the same price range. It offers slightly taller dimensions at 175 x 50 x 40 cm but heavier build at 110 kg. Navigation relies on visual SLAM and indoor SLAM without LiDAR mapping. Control is limited to remote teleoperation, positioning it for straightforward remote handling operations.
Detailed Analysis
Design & Build Quality
MH3 measures 170 x 50 x 40 cm and weighs 75 kg, providing a lighter and more compact frame than MH2's 175 x 50 x 40 cm and 110 kg. The reduced weight of MH3 may facilitate easier deployment in space-constrained areas. Both share similar width and depth at 50 x 40 cm, supporting consistent workspace integration. MH2's added height and mass suggest robustness for heavier industrial loads.

Mobility & Navigation
MH3 achieves 3.5 km/h maximum walking speed with indoor SLAM, visual SLAM, and LiDAR mapping for enhanced environmental mapping. MH2 reaches 3.6 km/h using visual SLAM and indoor SLAM exclusively. The LiDAR capability in MH3 enables more accurate 3D mapping in complex indoor settings. Both models support reliable low-speed locomotion suitable for assembly tasks.

Sensors & Perception
MH3 incorporates RGB cameras, stereo cameras, LiDAR, ultrasonic sensors, IMU, gyroscope, force sensors in arms, and temperature sensors. MH2 includes RGB cameras, stereo cameras, IMU, gyroscope, force sensors in hands and arms, ultrasonic sensors, and temperature sensors but lacks LiDAR. The additional LiDAR on MH3 improves depth perception and obstacle avoidance. Force sensors differ slightly in placement, with MH3 specifying arms and MH2 hands and arms.

AI Capabilities
MH3 supports autonomous task programming and learned behaviors beyond teleoperation. MH2 is restricted to remote teleoperation only. This expanded control in MH3 allows for independent operation in structured environments. Both utilize ROS2-based OS with C++ and Python APIs for development.

Battery & Power Efficiency
Both MH3 and MH2 offer 4 years usable battery life. No differences appear in specified power specifications. This longevity supports extended deployments without frequent recharging. Battery performance aligns with demands of continuous industrial use.

Use-Case Suitability
MH3 suits skilled labor augmentation in manufacturing assembly, remote operation in hazardous sites, precision tool handling, and dexterity-focused service tasks. MH2 applies to industrial assembly, remote inspection, hazardous material handling, and service robotics. MH3's advanced control enables more autonomous precision work. MH2 focuses on teleoperated inspection and handling.

Software Ecosystem
Both robots run ROS2-based OS with C++ and Python APIs. MH3 adds proprietary teleoperation software supporting VR and haptic feedback. MH2 lacks this specialized software layer. The shared core enables cross-compatible development.
Safety Features
MH3 and MH2 both include force limiting, collision detection, emergency stop, and collaborative mode. MH3 specifies safe proximity sensors additionally. These features ensure human-robot interaction safety. Common elements support industrial compliance.
Analysis Score Summary
Total Score
10
MH3
VS
Based on Detailed Analysis
Total Score
6
MH2
📊 Win: 2 points | Trade-off: 1 point each
Scores are summed across every insight: a clear winner earns 2 points, while balanced trade-offs give each robot 1 point. The total reflects how often each robot outperforms the other (or shares the spotlight) throughout the detailed analysis sections.
Technical Specifications
Head-to-head performance data and metrics
| Specification | Model AMH3 | Model BMH2 |
|---|---|---|
Functional Utility & Use Cases4 Comparative Metrics | ||
Control Method | Teleoperation via immersive VR with haptic feedback, autonomous task programming, learned behaviors | Remote teleoperation only |
Use Cases | Skilled labor augmentation in manufacturing assembly, remote operation in hazardous sites, precision tool handling, service tasks requiring human-like dexterity | Skilled labor augmentation in industrial assembly, remote inspection, hazardous material handling, service robotics |
Multi Robot Coord | Supports multi-robot coordination for collaborative tasks | Not supported |
Pet Friendly | Yes, with safety protocols | Yes, with safety protocols |
Manipulation & Load Capacity4 Comparative Metrics | ||
Carrying Capacity | 13.5 kg per arm | 15 kg per arm |
Deadlift Capacity | 27 kg maximum combined (both arms) | 30 kg maximum |
Payload Type | Tools, packages, precision instruments, human interaction tasks | Tools, packages, precision instruments, human interaction objects |
Modular Attachments | Tool changers, interchangeable end-effectors for specialized tasks | Tool changers, end-effector options available |
Kinematic Architecture & Dexterity4 Comparative Metrics | ||
Degrees of Freedom | - | 24 DOF |
Material | Aluminum frame, composite panels, soft-touch plastics on exterior | Aluminum frame, composite panels, soft-touch plastics on manipulators |
Mobility Type | Legged (bipedal walking) | Wheeled (omni-directional mobile base) |
Hardware Interface | USB 3.0, GPIO, CAN bus, serial ports | USB-C, GPIO, CAN bus, serial ports |
Functional Utility & Use Cases
4 Comparative Metrics
Manipulation & Load Capacity
4 Comparative Metrics
Kinematic Architecture & Dexterity
4 Comparative Metrics
Related Comparisons
Discover similar robot matchups to expand your knowledge and find the perfect solution

MH3 vs Dex
Which robot wins? MH3 vs Dex compared across navigation, battery, sensors, mobility, and price.


NEO Home Robot vs ELIXIS
NEO Home Robot or ELIXIS? See which humanoid robot performs better for manufacturing, logistics, and research.


Sophia vs Aria - Robot Girlfriend
Head-to-head: Sophia vs Aria - Robot Girlfriend compared on bipedal balance, AI learning, and real-world deployment.

Figure 03 vs VR-H3
Which humanoid robot is better? Figure 03 vs VR-H3 compared for dexterity, AI capabilities, and price.
Disclaimer
All content, comparisons, and verdicts on this website are based on our research, testing, and opinion. While we strive for accuracy, we do not guarantee the completeness, reliability, or suitability of any information. Performance, specifications, and results may vary depending on usage and conditions. This website and its authors are not responsible for any decisions, actions, or outcomes based on the information provided. Always verify product details with the manufacturer before making purchase or operational decisions.