
Allegro Hand V5 Sense
The Allegro Hand V5 Sense is an advanced dexterous robotic hand by Wonik Robotics featuring 16 pressure sensors for precise tactile feedback and natural grasping capabilities. Equipped with adduction and abduction movements, it supports both CAN bus and Ethernet communication for reliable real-time control. Designed for research, education, and industrial applications requiring high-precision manipulation and haptic awareness.
Robot Specifications
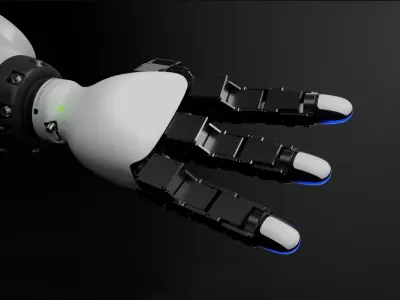
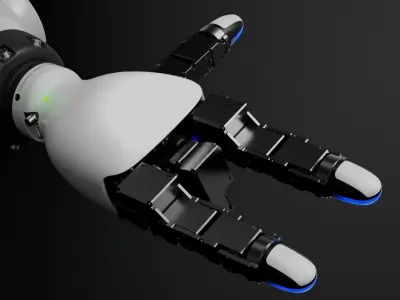
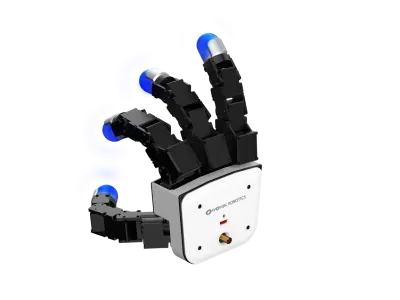
Image Gallery
Below images are from Wonik Robotics's official sources





Review Videos
Watch expert reviews and demonstrations of this robot




More Robots from Wonik Robotics
Explore other robots from this manufacturer



Frequently Asked Questions
Get answers to common questions about this robot
Q1.What is the grip strength or payload capacity of the Allegro Hand V5 Sense?
The Allegro Hand V5 Sense supports a payload of up to 15 kg, depending on grasp type, object geometry, friction, and test method; validate for your specific application. Stall torque is 0.92 N·m (typical) or 1.84 N·m (2nd finger joint, excluding thumb), with nominal torque at 0.23 N·m (typical) or 0.46 N·m.
Q2.How many fingers and degrees of freedom (DoF) does the Allegro Hand V5 Sense have?
It features 4 fingers (3 fingers + 1 thumb) with 16 active degrees of freedom (4 DoF per finger), using DC motor actuation for precise, torque-controlled manipulation.
Q3.What are the communication and control specifications for the Allegro Hand V5 Sense?
It uses a real-time CAN interface with 500 Hz control/communication frequency, supporting RS-485 (planned); joint resolution is 0.088°.
Q4.What power requirements does the Allegro Hand V5 Sense need?
It requires 24 V at 5.0 A (120 W max); some documentation notes 12-24 V compatibility.
Q5.What SDK or programming options are available for the Allegro Hand V5 Sense?
It includes the Allegro Hand Console Application for simulation-based algorithm prototyping, hardware testing, real-time control, and multiple ready-to-use grasping algorithms; supports Windows (Visual Studio optional), Linux (ROS), and custom CAN configuration.
Q6.What are the main use cases for the Allegro Hand V5 Sense?
Designed for research and development in dexterous manipulation, grasping objects of diverse shapes/materials (rigid/soft), contact-rich tasks, and applications in robotics institutes/industry like Facebook AI, EPFL, UPC.
Q7.What fingertip sensor options are available for the Allegro Hand V5 Sense?
It features optional 360° omnidirectional pneumatic tactile sensors for pressure detection; types include A (firm grip), B (delicate objects), C (stronger top-focused), D (lateral grips); kits sold separately for non-sensor versions.
Q8.What is the weight and physical size details of the Allegro Hand V5 Sense?
Weight is 1,024 g (manufacturer) or ~1.20 kg (with cabling/packaging); compact anthropomorphic design with gear ratios of 288.35
Q9.What maintenance, safety, and pricing information is available for the Allegro Hand V5 Sense?
Maintenance involves confirming latest datasheets for revisions; safety supports real-time control for stable grasping but validate payloads; pricing not publicly listed—contact Wonik Robotics or suppliers like MYBOTSHOP for quotes, as it varies by configuration (e.g., with/without sensors).
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.