
RH56DFX
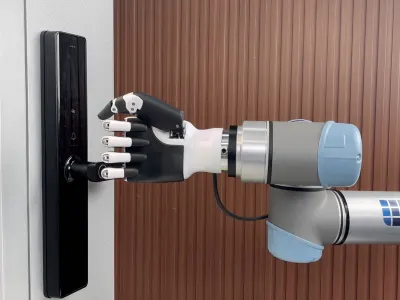
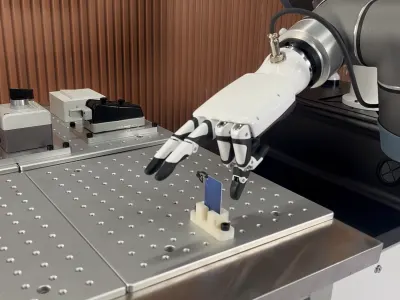
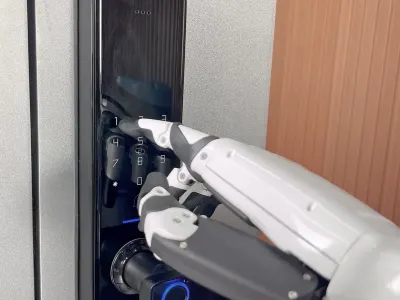
The RH56DFX is a dexterous humanoid robot hand from Inspire Robotics featuring an innovative linear drive design with six miniature linear servo actuators and six integrated pressure sensors. It offers 6 degrees of freedom and 12 motor joints to mimic human hand motions, enabling accurate grasping via hybrid force-position control. With moderate speed and large grip force, it supports ROS integration and is ideal for robotic grasping operations in humanoids and prosthetics.
Robot Specifications
Image Gallery
Below images are from Inspire Robotics's official sources





Review Videos
Watch expert reviews and demonstrations of this robot




More Robots from Inspire Robotics
Explore other robots from this manufacturer



One Robot
Infinite Possibilities
One Robot
Infinite Possibilities

TP-01 by Raydiculous
Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is the humanoid robot hand RH56DFX, and what problem does it solve?
The RH56DFX is a five-finger dexterous robotic hand developed by Inspire Robotics, featuring 6 degrees of freedom and 12 joints. According to the manufacturer, it addresses limitations of parallel-jaw grippers by enabling diverse grasps like pinch and power grasps for robotic arms and humanoid platforms.
Q2. What are the main capabilities and key features of RH56DFX?
The RH56DFX incorporates an innovative linear drive design with six micro linear servo actuators, hybrid force-position control, and integrated pressure sensors. According to Inspire Robotics, it simulates human-like grasping with moderate speed and self-locking on power-off.
Q3. Which industries and use cases is RH56DFX built for?
The RH56DFX is designed for robotics research, prosthetics, industrial automation, and humanoid platforms. Manufacturer descriptions note its suitability for grasping operations requiring dexterity, such as those on Unitree H1 and G1 robots.
Q4. What is the grip strength and dexterity of RH56DFX?
The RH56DFX provides large gripping force with integrated force sensors for precise control. According to reseller specifications, it achieves sub-millimeter repeatability and supports loads up to several kilograms while mimicking human hand dexterity.
Q5. Is RH56DFX compatible with standard robotic arms?
Yes, the RH56DFX mounts on standard robotic arms and humanoid platforms, with options for a mechanical wrist package. It is noted for compatibility with systems like Unitree H1, facilitating integration for manipulation tasks.
Q6. Does RH56DFX support tactile sensing or force feedback?
The RH56DFX includes integrated force sensors and pressure sensors for real-time tactile feedback. According to the manufacturer, this enables precise grip control through hybrid force and position algorithms.
Q7. What programming interfaces or SDKs are available for RH56DFX?
The RH56DFX supports Robot Operating System (ROS) with dedicated plug-ins. Inspire Robotics states it uses RS485 communication protocol for control and integration into robotic systems.
Q8. How does RH56DFX compare to other robotic end-effectors?
Compared to parallel-jaw grippers, the RH56DFX offers greater dexterity via multi-joint architecture and sensor feedback for in-hand manipulation. Reseller analyses position it as an anthropomorphic hand for tasks beyond basic grasping.
Q9. What level of maintenance is required for RH56DFX?
The RH56DFX features a drive-and-control integrated design with power-off self-locking, suggesting low maintenance needs. Manufacturer information indicates a 12-month warranty, but specific upkeep details are not detailed publicly.
Q10. Is RH56DFX currently available for commercial purchase?
Yes, the RH56DFX is listed for sale through resellers like Foxtech and US Robot Store, including accessories such as power adapters and cables. Inspire Robotics offers it for research, prosthetics, and industrial applications.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.