
RH56E2
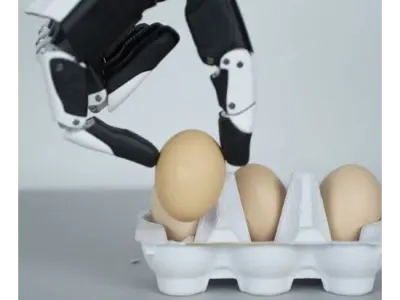
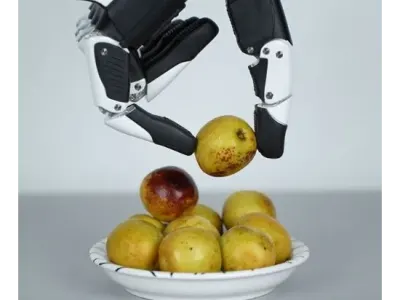
The RH56E2 Series is a five-finger dexterous robotic hand featuring 6 degrees of freedom with integrated tactile sensing capabilities. Designed for humanoid and service robotics applications, it combines reliable grip strength (up to 15 kg) with real-time tactile feedback from 17 sensors distributed across the hand, enabling precise object manipulation and adaptive force control for both delicate and demanding tasks.
Robot Specifications
Image Gallery
Below images are from Inspire Robotics's official sources






Review Videos
Watch expert reviews and demonstrations of this robot

More Robots from Inspire Robotics
Explore other robots from this manufacturer



One Robot
Infinite Possibilities
One Robot
Infinite Possibilities

TP-01 by Raydiculous
Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is the humanoid robot hand RH56E2, and what problem does it solve?
The RH56E2 is a five-finger dexterous robotic hand developed by Beijing Inspire Robots Technology Co., Ltd. (Inspire Robotics). According to the manufacturer, it addresses challenges in precise gripping and manipulation by integrating tactile sensors for real-time feedback.
Q2. What are the main capabilities and key features of RH56E2?
The RH56E2 features 6 degrees of freedom across 12 joints, up to 17 tactile sensors, and force sensing. According to the manufacturer, it provides precise control for grasping tasks with power-off self-locking capability.
Q3. Which industries and use cases is RH56E2 built for?
The RH56E2 is designed for humanoid robots, service robots, research, light industrial automation, and pick-and-place tasks. According to the manufacturer, it supports applications requiring dexterous manipulation.
Q4. What is the grip strength and dexterity of RH56E2?
The RH56E2 offers 6 degrees of freedom and five-finger dexterity. According to the manufacturer, it achieves 3 kg primary force per finger with force sensors for controlled gripping.
Q5. Is RH56E2 compatible with standard robotic arms?
Yes, the RH56E2 supports integration with common robotic arms via modular design. According to the manufacturer, it uses CAN, RS485, or ModbusTCP interfaces for compatibility.
Q6. Does RH56E2 support tactile sensing or force feedback?
The RH56E2 integrates up to 17 tactile sensors and 6 force sensors per hand. According to the manufacturer, these enable real-time tactile feedback and precise force control during operations.
Q7. What programming interfaces or SDKs are available for RH56E2?
The RH56E2 uses CAN, RS485, ModbusTCP, and Ethernet interfaces with register-based control commands. According to the manufacturer, these allow straightforward programming without specified SDK details.
Q8. How does RH56E2 compare to other robotic end-effectors?
The RH56E2 provides anthropomorphic five-finger design with integrated tactile and force sensing, differing from simpler grippers. According to the manufacturer, its 6-DoF structure suits nuanced manipulation over basic end-effectors.
Q9. What level of maintenance is required for RH56E2?
The RH56E2 features power-off self-locking and no homing requirement after power-on. According to the manufacturer, this design reduces maintenance needs for reliable operation.
Q10. Is RH56E2 currently available for commercial purchase?
The RH56E2 is listed for sale through distributors, with some variants on backorder. According to the manufacturer, it is available for research and automation applications.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.