
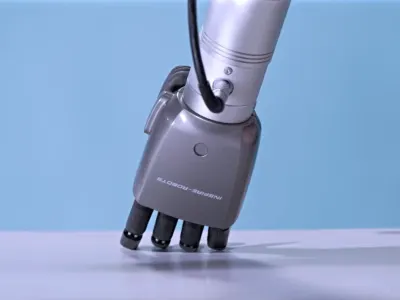
RH56F1
The RH56F1 is a 5-finger dexterous robotic hand from Inspire Robotics featuring an all-metal integrated skeleton for high rigidity, 6 degrees of freedom across 12 joints, and 6 linear servo actuators for precise, human-like movements. It integrates pressure sensors for adaptive gripping of objects with varying hardness, supports force/position control, and is designed for applications like service robots, teaching aids, and prosthetics with concise interface commands for quick manipulation.
Robot Specifications
Image Gallery
Below images are from Inspire Robotics's official sources







Review Videos
Watch expert reviews and demonstrations of this robot




More Robots from Inspire Robotics
Explore other robots from this manufacturer



One Robot
Infinite Possibilities
One Robot
Infinite Possibilities

TP-01 by Raydiculous
Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is the humanoid robot hand RH56F1, and what problem does it solve?
The RH56F1 is a five-finger anthropomorphic robotic end-effector manufactured by Inspire Robotics designed for humanoid robots and mobile manipulators. It addresses the limitation of conventional parallel grippers by enabling human-like grasping patterns and contact-rich manipulation tasks that require dexterous finger control.
Q2. What are the main capabilities and key features of RH56F1?
The RH56F1 features six degrees of freedom across twelve motor joints, an all-metal integrated skeleton for structural rigidity, built-in pressure sensors for grip control, and support for mixed force and position control. According to the manufacturer, the hand integrates linear servo actuators with sensor fusion and algorithms for adaptive grasping.
Q3. Which industries and use cases is RH56F1 built for?
The RH56F1 is positioned for service robotics, research platforms, humanoid robot integration, and bimanual manipulation tasks. According to Inspire Robotics, applications include service robots, teaching aids, and prosthetics where versatile object handling is required.
Q4. What is the grip strength and dexterity of RH56F1?
The four fingers provide a gripping force of 10 newtons in direct force mode and 4 newtons in back force mode, while the thumb provides 15 newtons and 6 newtons respectively. The hand achieves repeated fingertip positioning accuracy of 0.2 millimeters with a force sensor resolution of 0.5 newtons.
Q5. Is RH56F1 compatible with standard robotic arms?
The RH56F1 is designed as a modular end-effector for integration with humanoid robots, mobile manipulators, and research platforms. Compatibility depends on the mounting interface and control system of the specific robotic platform, with integration typically requiring mechanical mounting and communication protocol configuration.
Q6. Does RH56F1 support tactile sensing or force feedback?
Yes, the RH56F1 includes built-in pressure sensors that enable tactile feedback and force sensing. Users can configure different pressure thresholds to adapt grip control for objects of varying hardness, and the system supports mixed force and position control approaches.
Q7. What programming interfaces or SDKs are available for RH56F1?
The RH56F1 supports multiple communication interfaces including EtherCAT, RS485, CAN FD, and RS232. The manufacturer provides control instructions and user manuals with register-based command structures for griping force configuration and finger movement control.
Q8. How does RH56F1 compare to other robotic end-effectors?
The RH56F1 differs from conventional parallel grippers through its five-finger anthropomorphic design and twelve-joint structure, enabling complex grasping patterns such as power grasps, pinch grasps, and tripod-style grasps. This design targets applications requiring human-like manipulation rather than simple two-point clamping.
Q9. What level of maintenance is required for RH56F1?
The user manual specifies a calibration process requiring approximately six seconds, performed with the hand in an unloaded state. Specific maintenance schedules and component replacement intervals are not detailed in available documentation.
Q10. Is RH56F1 currently available for commercial purchase?
Yes, the RH56F1 is available for commercial purchase through authorized distributors. Pricing varies by configuration and region, with right-hand and left-hand variants offered as matched pairs for bimanual applications.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.