
iRonCub
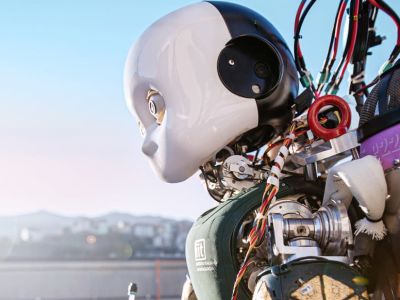
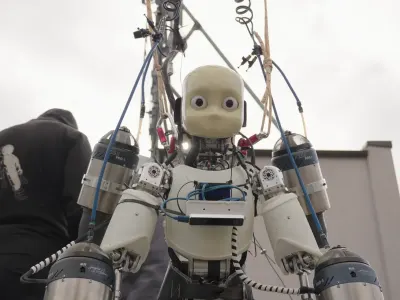
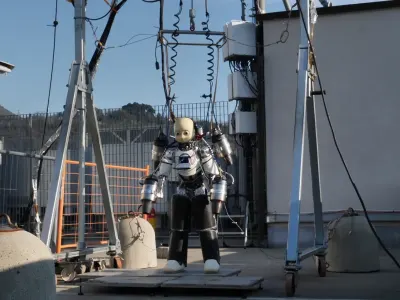
iRonCub is a groundbreaking jet-powered flying humanoid robot developed by IIT's AMI lab, transforming the iCub3 platform into the world's first humanoid capable of controlled flight. Equipped with four micro-jet engines—two on the arms and two on a backpack jetpack—it generates over 1000 Newtons of thrust to achieve stable hover up to 50 cm, managing extreme heat over 800°C via a titanium spine and heat-resistant covers. Advanced AI control systems, including neural networks and UKF pose estimation, enable human-like balance amid turbulent airflows, shifting center of mass, and limb movements. Onboard sensors like IMU and depth cameras support real-time flight dynamics, multibody aerodynamics, and non-stationary maneuvers. Designed for research in aerial humanoid robotics, it pioneers applications in search-and-rescue, hazardous inspections, and disaster response, blending bipedal morphology with unprecedented aerial agility.
Robot Specifications
Image Gallery
Below images are from Italian Institute of Technology (IIT)'s official sources




Review Videos
Watch expert reviews and demonstrations of this robot

More Humanoid Robots
Discover more robots in the same category



Robots From Other Categories
Discover complementary robots from different categories that work well together




Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is iRonCub, and what problem is it designed to solve?
iRonCub is a research prototype developed by the Italian Institute of Technology (IIT) as a flying humanoid robot built on the iCub platform. According to IIT, it addresses challenges in navigating disaster zones by combining flight over obstacles with humanoid manipulation capabilities.
Q2. What are the main capabilities and key features of iRonCub?
iRonCub features four jet engines mounted on arms and a jetpack for thrust generation. IIT researchers report it demonstrates vertical liftoff, attitude control via quadratic programming, and sensor-based pose estimation using IMUs and depth cameras.
Q3. Who is iRonCub built for, and which industries can benefit from it?
iRonCub serves as a research platform for IIT's aerial humanoid robotics studies. It targets applications in disaster response, where robotics researchers explore flight and manipulation for search-and-rescue scenarios.
Q4. Is iRonCub a commercial product or still a research prototype?
iRonCub remains a research prototype. IIT has developed versions like MK3 on iCub3 for experiments in flight control and estimation, with no commercial release announced as of 2025.
Q5. Is iRonCub currently available for purchase, and when is it expected to ship?
iRonCub is not available for purchase. As a research platform by IIT, it is used internally for testing, with no public shipping timelines disclosed.
Q6. How does iRonCub actually work in real-world environments?
iRonCub operates through jet turbine thrust for liftoff, controlled by software estimating pose from onboard sensors and computing throttle via optimization. IIT tests show stable hovering in controlled areas, accounting for aerodynamic effects.
Q7. When was iRonCub announced or officially launched?
iRonCub prototypes were developed by IIT starting from iCub platforms, with iRonCub3 demonstrations reported in 2024. Key flight tests, including vertical liftoff, were showcased in research publications that year.
Q8. How is iRonCub different from other robots in the same category?
Unlike wheeled or legged humanoids, iRonCub integrates jet propulsion on an iCub base for aerial mobility. IIT's design includes hardware modifications like a titanium spine to handle thrust and heat.
Q9. Does iRonCub require additional development or customization after purchase?
As a non-commercial research prototype, iRonCub is not for purchase. IIT continues iterative development, refining CAD models and control algorithms based on experimental feedback.
Q10. What is the future roadmap or planned upgrades for iRonCub?
IIT plans to enhance iRonCub with improved yaw control, aerodynamic modeling, and potential wing additions. Researchers aim to advance toward autonomous flight in simulations and real-world tests.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.