ChangingTek Robotics’ Universal Wheeled Humanoid Robot points to teleoperation-first humanoids for human workspaces
Published
June 8, 2026
Reading Time
3 min read
Author
Origin Of Bots Editorial Team

Human work, mobile frame
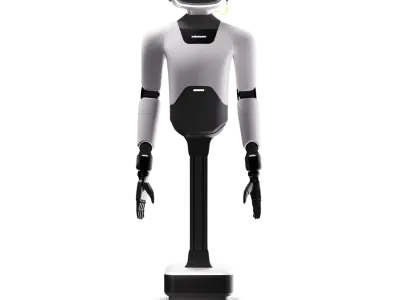
Humanoid robots are being pushed toward jobs that require balance, fine manipulation, and safe movement around people, and wheeled bases are becoming a practical way to deliver that without the complexity of full bipedal walking. ChangingTek Robotics has positioned its Universal Wheeled Humanoid Robot around that shift, with a design intended for teleoperation and assisted work in human-centric spaces.
What sets it apart
What makes this robot notable is the combination of a wheeled omnidirectional base, full-body coordination, and control software built around ROS2 and Python APIs, which suggests a system designed for remote operation rather than pre-scripted motion alone. The reported sensor stack, including RGB and stereo cameras, LiDAR, ultrasonic sensing, IMU, gyroscope, force sensors, and temperature sensing, points to an emphasis on perception and collision awareness during close-contact tasks. Its stated focus on tools, packages, precision instruments, and human interaction also places it closer to a workplace helper than a single-purpose machine. This is less about spectacle and more about making teleoperated humanoids usable in real facilities.
How it works
The core flow is straightforward: human motion input goes into AI model processing, which then drives joint actuation while the system continuously applies balance correction. In practical terms, that means the operator’s movements are interpreted, translated into robot motion, and adjusted in real time so the robot can stay stable while manipulating objects or moving through a workspace. The navigation layer uses LiDAR SLAM and visual SLAM, which supports indoor movement when the robot has to reposition between tasks.
Lab tasks first
A realistic deployment scenario is laboratory sample handling, where a humanoid form factor matters because the robot can work at benches, reach into standard lab setups, and interact with tools designed for human hands. In that setting, force limiting, collision detection, emergency stop, and collaborative mode are not optional extras but the features that make teleoperation viable around technicians and sensitive equipment. The robot’s reported payload focus on precision instruments fits this environment better than heavy industrial hauling.
Reported build profile
ChangingTek’s robot is reported at 180 x 60 x 50 cm and 170 kg, a size and mass profile that suggests a substantial platform rather than a lightweight service unit. Its listed speed of 1.5 m/s / 5.4 km/h and wheeled mobility point to efficient indoor repositioning, while the battery life is described as a typical 3 to 5 year range for this class rather than a confirmed device-specific endurance figure. Taken together, the published specs frame it as a controlled, indoor-oriented humanoid platform built for manipulation and collaboration more than fast travel.
Rivals Edge Check
| Robot | Key Advantage | Where Universal Wheeled Humanoid Robot Wins | Target Use |
|---|---|---|---|
| Panther | Agility and mobility focus | Stronger reported emphasis on teleoperation workflows and collaborative safety features | Human-centric service and inspection |
| Q5 | Broader humanoid versatility | More explicit integration of ROS2, Python APIs, and SLAM for indoor task execution | Assisted workplace manipulation |
| David | Dexterous interaction profile | Wheeled base and sensor suite better fit repeated indoor repositioning | Lab and light industrial handling |
| HMND 01 Alpha Wheeled | Wheeled humanoid platform design | Reported payload focus on tools, packages, and precision instruments fits task work | Manufacturing collaboration |




Industry direction
The broader signal is that humanoid robotics is moving away from motion libraries as the main selling point and toward systems that can be supervised by humans in real workplaces. That shift favors robots that can combine perception, compliant motion, and software openness, especially where operators need reliable remote control instead of full autonomy. If this direction holds, the near-term market will reward humanoids that solve the “human in the loop” problem before attempting to replace it.
Sources
Related Articles

Geek+ unveils Gino 1, a warehouse humanoid built for picking, packing and inspection
Robot.com positions R Noid as a teleoperation-first humanoid for real work

Robot.com’s R Top highlights the shift toward teleoperated humanoids for fixed workstations

Galbot positions S1 for heavy factory work as wheeled humanoids push into production-line deployment
Related Comparisons
Compare Universal Wheeled Humanoid Robot with similar robots

GR-1 vs Unitree H1-2
Head-to-head: GR-1 vs Unitree H1-2 compared on bipedal balance, AI learning, and real-world deployment for research and care.


Titan 01 vs CyberOne 2026 Version
Which humanoid robot is better? Titan 01 vs CyberOne 2026 Version compared for dexterity, AI capabilities, and price.


NEO Home Robot vs ELIXIS
NEO Home Robot or ELIXIS? See which humanoid robot performs better for manufacturing, logistics, and research.


Sophia vs Aria - Robot Girlfriend
Head-to-head: Sophia vs Aria - Robot Girlfriend compared on bipedal balance, AI learning, and real-world deployment.
Learn More About This Robot
Discover detailed specifications, reviews, and comparisons for Universal Wheeled Humanoid Robot.
View Robot Details →