Galbot positions S1 for heavy factory work as wheeled humanoids push into production-line deployment
Robot Details
Galbot S1 • Galbot RoboticsPublished
June 8, 2026
Reading Time
3 min read
Author
Origin Of Bots Editorial Team

Factory labor pressure
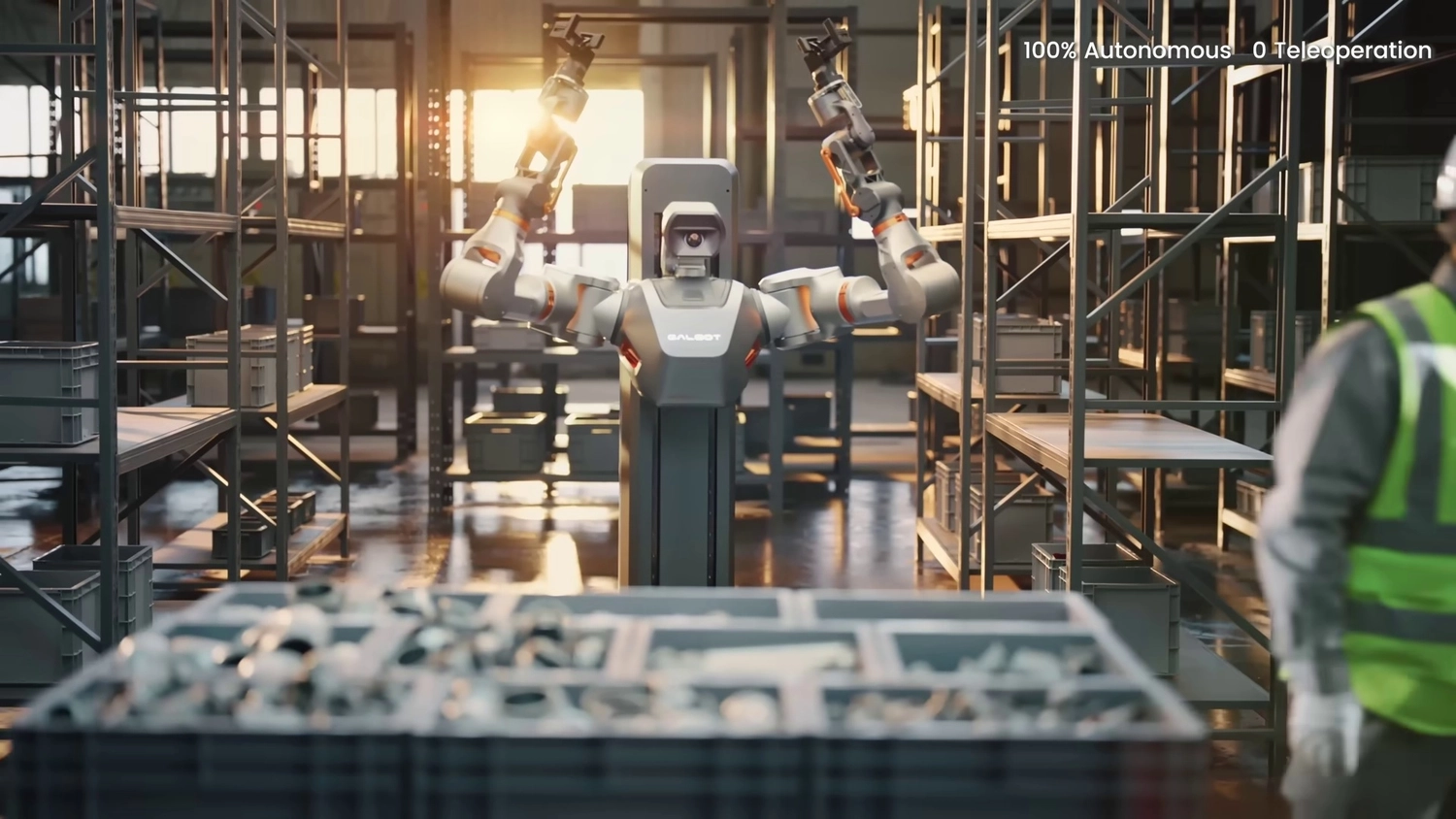
Humanoid robots are increasingly being built to handle the gap between human workspaces and rigid industrial automation, especially where lifting, reaching, and shared-space navigation matter. Galbot’s S1 is being presented as a heavy-duty wheeled humanoid for factory use, with the company highlighting a 2300 mm vertical working height, 700 mm front working range, and up to 50 kg payload capacity for industrial handling tasks.
Why S1 stands out
What distinguishes the S1 is not just movement, but the combination of full-body humanoid form, wheeled mobility, and a system designed to work around people and machines without floor markers. Galbot says the robot uses vision-based perception with LiDAR SLAM, 360-degree obstacle avoidance, and a proprietary embodied AI model that is ROS2 compatible, which points to a platform built for teleoperation and assisted work rather than scripted motion alone. Its reported focus on heavy materials, tools, and industrial packages also places it in a narrower niche than lighter humanoids aimed at general manipulation. The S1 is less about humanoid appearance than about making shared-space industrial work more practical.

How it works
In simple terms, the system flow is human motion input, AI model processing, then joint actuation and balance correction, which is the core loop for humanoid operation in human-centric spaces. Galbot’s reported software stack and sensor suite suggest that vision, LiDAR, and force feedback are used to interpret the environment before the robot moves its body, while the wheeled base handles most travel and the arms handle manipulation. That architecture fits the category’s central challenge: keeping a humanoid stable, responsive, and precise while a person directs or supervises the task.
Battery line work
One of the clearest deployment scenarios for the S1 is battery production lines, where materials must be moved reliably through dense industrial spaces and repeated handling tasks can be physically demanding. In that setting, a humanoid form matters because it can work with existing factory layouts, reach shelves and fixtures designed around human operators, and move tools or packages without requiring a full facility redesign. Galbot’s emphasis on heavy-duty handling makes this a more credible use case than broad consumer robotics claims.
Built for reach
The reported 230 cm height and 105 cm depth give the S1 a large working envelope for industrial stations, while the 70 cm shoulder width suggests a body optimized for operating in human-scale aisles and workcells. Its 5.4 km/h speed, or about 3.4 mph, is modest by vehicle standards but appropriate for supervised movement in factories, where control and safety matter more than pace. The sensor package, including three 40-line LiDAR units, RGB cameras, IMU, gyroscope, and force/torque sensing, is aimed at perception, balance, and collision awareness rather than raw autonomy.
Rivals Edge Check
| Robot | Key Advantage | Where Galbot S1 Wins | Target Use |
|---|---|---|---|
| Panther | Strong emphasis on humanoid motion and shared-space operation | Higher reported payload and heavier industrial handling focus | Factory manipulation |
| Universal Wheeled Humanoid Robot | Wheeled humanoid design for human environments | More explicit industrial packaging and battery-line positioning | Assisted industrial work |
| F-Series Robot | Strong platform approach for structured workflows | Larger working envelope and heavier material-handling emphasis | Production-line tasks |
| David | Compact humanoid positioning for human-centric spaces | More aggressive industrial payload framing and factory deployment focus | Material handling |




Industry direction
The broader signal is that humanoid robotics is moving toward teleoperation-first systems that can be inserted into existing workplaces instead of waiting for fully autonomous general-purpose intelligence. That shift favors robots that combine stable remote control, strong perception, and high manipulation capacity, especially in factories where uptime and safety are more important than flashy demonstrations. If that trend holds, the competitive edge will come from how reliably a humanoid can be supervised, not how humanlike it looks.
Related Articles
Unitree’s H2 Plus pushes humanoids toward teleoperation-first research

Geek+ unveils Gino 1, a warehouse humanoid built for picking, packing and inspection
Robot.com positions R Noid as a teleoperation-first humanoid for real work

Robot.com’s R Top highlights the shift toward teleoperated humanoids for fixed workstations
Related Comparisons
Compare Galbot S1 with similar robots

GR-1 vs Unitree H1-2
Head-to-head: GR-1 vs Unitree H1-2 compared on bipedal balance, AI learning, and real-world deployment for research and care.


Titan 01 vs CyberOne 2026 Version
Which humanoid robot is better? Titan 01 vs CyberOne 2026 Version compared for dexterity, AI capabilities, and price.


NEO Home Robot vs ELIXIS
NEO Home Robot or ELIXIS? See which humanoid robot performs better for manufacturing, logistics, and research.


Sophia vs Aria - Robot Girlfriend
Head-to-head: Sophia vs Aria - Robot Girlfriend compared on bipedal balance, AI learning, and real-world deployment.
Learn More About This Robot
Discover detailed specifications, reviews, and comparisons for Galbot S1.
View Robot Details →