Robot.com positions R Noid as a teleoperation-first humanoid for real work
Robot Details
R Noid • Robot.comPublished
June 8, 2026
Reading Time
3 min read
Author
Origin Of Bots Editorial Team
Human-scale work
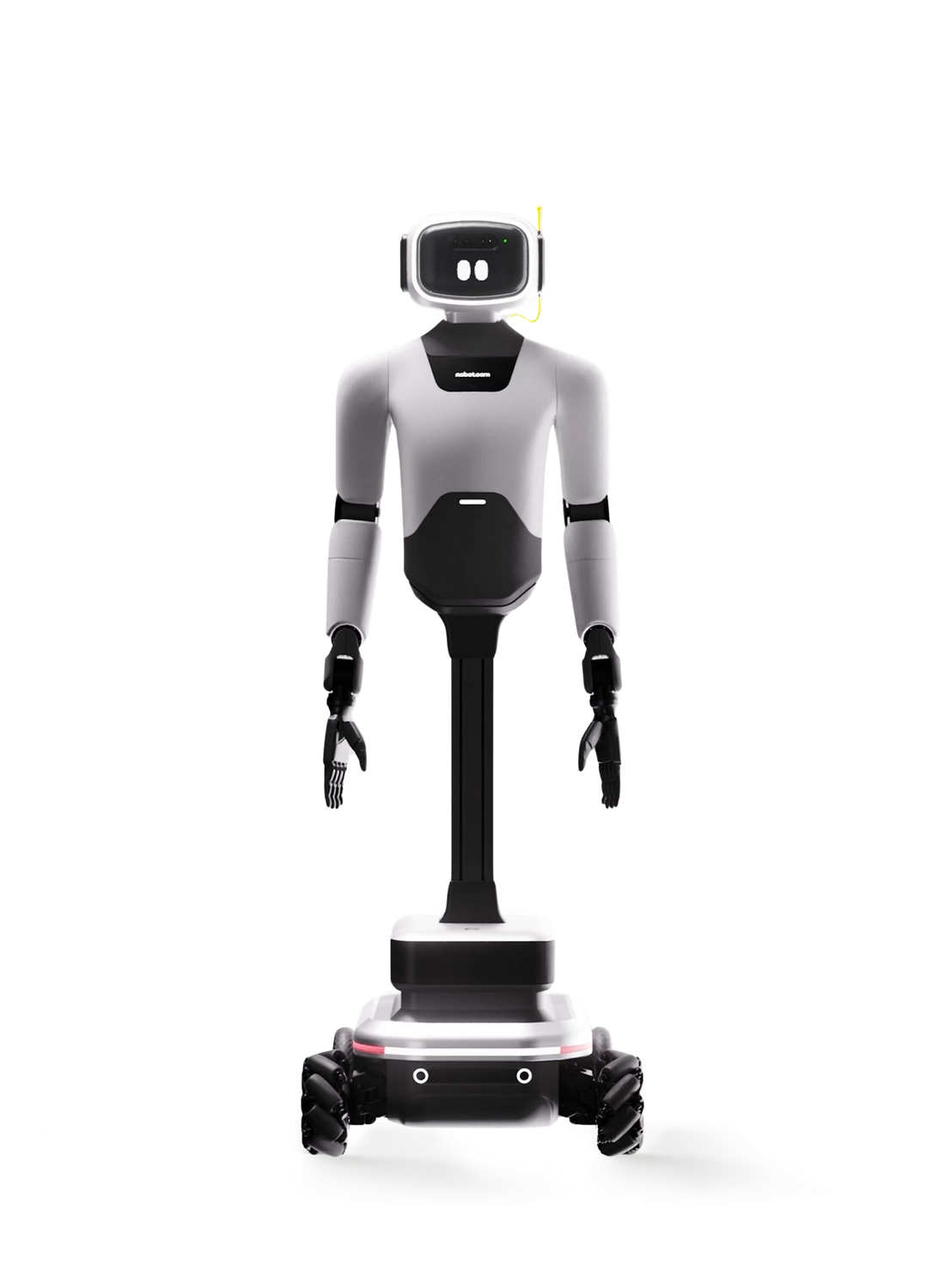
Robot.com has presented R Noid as a humanoid robot built for practical work in human environments, with the company describing it as a machine meant to handle repetitive tasks on factory floors, in warehouses, and in service settings. The available material frames the robot as a working system rather than a lab prototype, and recent product pages emphasize dual-arm manipulation, navigation, and remote or assisted task execution.
Why it matters
R Noid sits in the part of the humanoid market where the hard problem is not just walking, but coordinating full-body motion while keeping manipulation stable enough for work that people currently do by hand. Its reported dual 7-DoF arms, modular tooling, human-scale frame, and indoor navigation stack point to a design optimized for interaction naturalness and real-time control in shared spaces. That makes it relevant to the broader shift toward teleoperation-first humanoids, where the value comes from useful work in real environments before full autonomy matures. R Noid is less about humanoid theatrics than about making remote work physically usable.

How it works
The system flow is straightforward: human motion input is interpreted by the AI control stack, the robot processes that signal through its Linux-based service layer and ROS 2 compatible architecture, and the joints then correct balance and execute the movement. Robot.com describes the software as pairing a proprietary service layer with a generative VLA autonomy stack, which suggests the robot is designed to translate operator intent into coordinated motion rather than depend on fixed motion scripts.
Warehouse focus
One concrete deployment path is warehouse handling, where R Noid is aimed at repetitive box, package, and parts movement in aisles and at workstations. In that setting, the robot’s value comes from navigating around people, picking up varied objects, and placing them accurately without requiring a dedicated fenced-off cell. The same profile also makes sense for semiconductor wafer transport, where careful handling and controlled motion matter more than raw speed.

What the specs enable
The reported 160 cm height and 50 kg weight place R Noid in a human-scale envelope that should fit standard workspaces and counters more naturally than larger industrial machines. Its 6 km/h maximum walking speed gives it a walking pace suited to indoor movement, while the sensor package, including RGB cameras, stereo vision, LiDAR, ultrasonic proximity sensors, a 9-axis IMU, and force and tactile sensing, is aimed at navigation, obstacle detection, and manipulation feedback. The stated safety features, including force limiting, collision detection, an emergency stop button, collaborative mode, and human-safe joint compliance, align with use around people rather than isolated automation cells.
Rivals Edge Check
| Robot | Key Advantage | Where R Noid Wins | Target Use |
|---|---|---|---|
| RAISE A1 | Strong fit for structured industrial manipulation and factory-style workflows | More emphasis on human-scale service interaction and teleoperation-friendly tasks | Industrial handling |
| Optimus | Broad visibility and ambitious general-purpose humanoid positioning | More clearly framed for near-term assisted service and remote operation | General-purpose labor |
| 4NE-1 Mini | Compact form factor for constrained spaces | Larger human-scale presence and broader manipulation profile | Small-space assistance |
| NEO Home Robot | Home-oriented assistance and domestic interaction | Better aligned to workplace handling, inspection, and service deployments | Home service |



Industry direction
R Noid reflects a wider industry signal: humanoids are increasingly being judged less by how elegantly they imitate people and more by how reliably they can be controlled in real workflows. That matters because the most credible near-term business cases are not fully autonomous household robots, but systems that can extend human labor into warehouses, kitchens, and inspection sites while operators remain in the loop. If that pattern holds, the next phase of humanoid competition will center on control quality, safety, and deployment economics rather than raw motion demos.
Related Articles

Fudan’s Guanghua No. 1 pushes humanoid robots toward elder care, not general-purpose autonomy
Unitree’s H2 Plus pushes humanoids toward teleoperation-first research

Geek+ unveils Gino 1, a warehouse humanoid built for picking, packing and inspection

Robot.com’s R Top highlights the shift toward teleoperated humanoids for fixed workstations
Related Comparisons
Compare R Noid with similar robots

GR-1 vs Unitree H1-2
Head-to-head: GR-1 vs Unitree H1-2 compared on bipedal balance, AI learning, and real-world deployment for research and care.


Titan 01 vs CyberOne 2026 Version
Which humanoid robot is better? Titan 01 vs CyberOne 2026 Version compared for dexterity, AI capabilities, and price.


NEO Home Robot vs ELIXIS
NEO Home Robot or ELIXIS? See which humanoid robot performs better for manufacturing, logistics, and research.


Sophia vs Aria - Robot Girlfriend
Head-to-head: Sophia vs Aria - Robot Girlfriend compared on bipedal balance, AI learning, and real-world deployment.
Learn More About This Robot
Discover detailed specifications, reviews, and comparisons for R Noid.
View Robot Details →