Robot.com’s R Top highlights the shift toward teleoperated humanoids for fixed workstations
Robot Details
R Top • Robot.comPublished
June 8, 2026
Reading Time
3 min read
Author
Origin Of Bots Editorial Team

Stationary work, human control
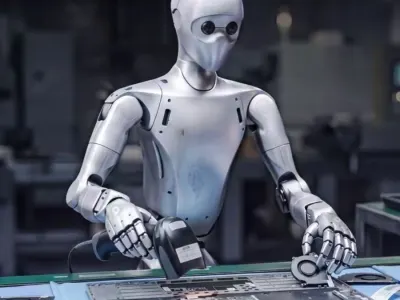
Robot.com’s R Top is designed to work from fixed surfaces with dual-arm humanoid manipulation, reflecting a growing push to bring robot assistance to human-centric tasks without full autonomy. Robot.com describes R Top as a stationary counterpart to its R Noid platform, aimed at precise workbench operations such as package handling, kitchen support, repetitive tasks, and precision assembly.
Why the design matters
R Top’s significance is less about movement and more about coordination at a fixed point: real-time full-body motion imitation, balance correction, and manipulation are the core challenges for this humanoid class. Its reported sensor stack, collaborative safety features, and support for RobotOS, ROS2, and Python APIs suggest a system built for teleoperation-first workflows rather than pre-scripted motion libraries. That matters because the industry is increasingly treating humanoids as operator-amplified tools for controlled environments, not general-purpose autonomous workers. R Top’s key innovation is making fixed-station humanoid work feel more natural to operate.
Motion to action
The technical flow for this category is straightforward: human motion input is captured, the AI model processes the movement, and the robot converts that into joint actuation with continuous balance correction. In practice, that means the operator provides the intent while the robot handles the fine coordination needed to keep arms aligned, motions smooth, and contact safe. For R Top, the value is in translating human dexterity into precise manipulation at a bench or table without requiring a fully autonomous decision stack.
A bench-top workflow
One realistic deployment scenario is repetitive precision assembly at a shared workstation, where an operator can guide the robot through delicate pick, place, and positioning steps. In that setting, force limiting and collision detection are especially important because the robot is working in close proximity to tools, parts, and human hands. The platform’s collaborative mode and emergency stop function make that kind of supervised, contact-rich task more practical than a purely autonomous system.
What the specs enable
Robot.com’s reported dimensions of 170 x 60 x 50 cm point to a humanoid form factor sized for fixed work surfaces rather than mobile navigation. The stated 45 kg weight and stationary mobility type fit a platform optimized for stable manipulation, while the listed RGB cameras, stereo cameras, force/torque sensors, IMU, gyroscope, and ultrasonic sensors support perception and control during close-in tasks. The software stack, including proprietary RobotOS with ROS2 compatibility and Python APIs, is intended to make the robot easier to integrate into research and automation workflows.
Rivals Edge Check
| Robot | Key Advantage | Where R Top Wins | Target Use |
|---|---|---|---|
| Elf V1 Series | Portable humanoid deployment for broader task coverage | More specialized fixed-station precision and workbench control | General humanoid assistance |
| Origin M1 | Mobility-oriented operation across varied environments | Better fit for stationary, contact-rich manipulation | Remote task execution |
| Elf-Xuan 2.0 | Humanlike coordination for embodied interaction | Stronger focus on fixed-surface precision work | Service and interaction tasks |
| Adam-U | General humanoid versatility in structured settings | More explicit bench-level, teleoperation-first positioning | Structured labor and assistance |




Industry direction
R Top also reflects a wider industry shift: humanoid developers are increasingly targeting human-centric spaces where reliable remote operation matters more than open-world autonomy. That market logic favors systems that can handle repetitive, precise work at fixed stations, especially where operators want the dexterity of a humanoid without the complexity of free-roaming navigation.
Related Articles

DLR’s GARMI pushes humanoid teleoperation into elder care and remote assistance

Fudan’s Guanghua No. 1 pushes humanoid robots toward elder care, not general-purpose autonomy
Unitree’s H2 Plus pushes humanoids toward teleoperation-first research

Geek+ unveils Gino 1, a warehouse humanoid built for picking, packing and inspection
Related Comparisons
Compare R Top with similar robots

GR-1 vs Unitree H1-2
Head-to-head: GR-1 vs Unitree H1-2 compared on bipedal balance, AI learning, and real-world deployment for research and care.


Titan 01 vs CyberOne 2026 Version
Which humanoid robot is better? Titan 01 vs CyberOne 2026 Version compared for dexterity, AI capabilities, and price.


NEO Home Robot vs ELIXIS
NEO Home Robot or ELIXIS? See which humanoid robot performs better for manufacturing, logistics, and research.


Sophia vs Aria - Robot Girlfriend
Head-to-head: Sophia vs Aria - Robot Girlfriend compared on bipedal balance, AI learning, and real-world deployment.
Learn More About This Robot
Discover detailed specifications, reviews, and comparisons for R Top.
View Robot Details →