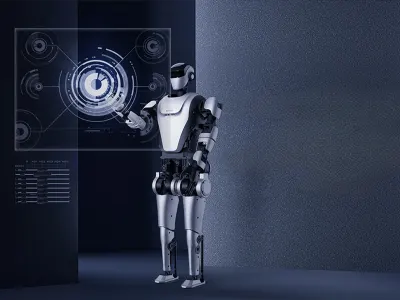
KUAVO-MY by Leju Robotics is a humanoid robot designed for versatile applications including manufacturing, research, logistics, and infrastructure inspection. It stands out for its advanced motion control, balance-assisted walking, and comprehensive sensor suite, supporting both teleoperation and autonomous behaviors. Positioned in the mid-to-high price range, KUAVO-MY targets users needing a robust, research-grade humanoid platform with Linux-based OS and ROS 2 support.
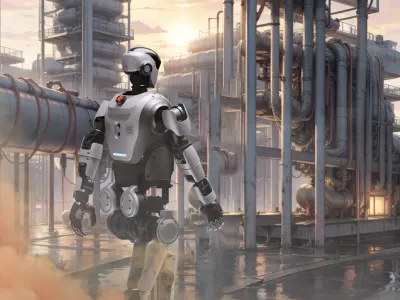
AlphaBot 2 by AI² Robotics shares a similar humanoid design and specification profile with KUAVO-MY, aimed at the same sectors such as manufacturing and remote operations. It offers comparable sensor arrays, navigation technologies, and control modes, operating within the same $50,000 to $150,000 price bracket. AlphaBot 2 emphasizes a Linux-based software ecosystem with Python SDK and ROS 2 compatibility for flexible application development.
Detailed Analysis

Design & Build Quality
Both KUAVO-MY and AlphaBot 2 have identical physical dimensions (170cm x 55cm x 38cm) and weight ranges (50-80 kg), reflecting similar humanoid form factors. KUAVO-MY is noted for its 30 degrees of freedom and high-frequency joint control enabling fluid, human-like full-body motion including jumping, which may provide an edge in dexterity and dynamic tasks. AlphaBot 2 matches the general build but lacks publicly detailed DOF specifications.
Mobility & Navigation
Each robot supports walking speeds between 1.5 to 3 m/s with balance-assisted locomotion. Their navigation systems integrate Visual SLAM and LiDAR mapping for environmental awareness. KUAVO-MY additionally incorporates advanced terrain handling, capable of uneven surfaces like sand or grass, which may enhance its operational range beyond structured environments. AlphaBot 2 provides similar navigation features but without explicit mention of terrain adaptability.
Sensors & Perception
Both robots feature extensive sensor suites including RGB cameras, depth cameras, LiDAR, IMU, force/torque sensors, gyroscopes, accelerometers, and joint encoders. KUAVO-MY is equipped with stereo depth cameras and a 6-microphone array for 3D perception and auditory response, enhancing situational awareness. AlphaBot 2 offers a comparable sensor set, supporting comprehensive perception but without detailed auditory capabilities described.

AI Capabilities
Control modes for both robots encompass teleoperation, autonomous operation, and learned behaviors, facilitated by Linux-based OS and ROS 2 support with Python SDKs. KUAVO-MY integrates model-based motion control and reinforcement learning to enable coordinated whole-body movement. AlphaBot 2 provides similar AI control frameworks, allowing flexible programming and autonomous task execution.

Battery & Power Efficiency
Both platforms offer battery lifespans of 3 to 5 years, suitable for sustained industrial and research use. No specific details on runtime per charge or power management strategies differentiate the two, indicating comparable power efficiency.

Use-Case Suitability
KUAVO-MY and AlphaBot 2 target overlapping markets such as manufacturing, research, logistics, infrastructure inspection, and remote operations. KUAVO-MY's demonstrated ability to operate in unstructured environments and perform nuanced tasks such as household chores suggests a slight advantage in versatile real-world deployment. AlphaBot 2 maintains competitive suitability across the same domains with a focus on flexible software integration.

Safety Features
Both robots include force limiting, collision detection, emergency stop functions, and redundant sensor systems to ensure operational safety. These features are critical for human-robot interaction and industrial environments, with no major differences apparent.

Software Ecosystem
KUAVO-MY and AlphaBot 2 both run on Linux-based operating systems, support ROS 2 middleware, and provide Python SDKs for application development. This commonality facilitates developer engagement and integration with existing robotics frameworks, supporting customization and secondary development.
Analysis Score Summary
Total Score
9
KUAVO-MY
VS
Based on Detailed Analysis
Total Score
7
AlphaBot 2
📊 Win: 2 points | Trade-off: 1 point each
Scores are summed across every insight: a clear winner earns 2 points, while balanced trade-offs give each robot 1 point. The total reflects how often each robot outperforms the other (or shares the spotlight) throughout the detailed analysis sections.
Technical Specifications
Head-to-head performance data and metrics
| Specification | Model AKUAVO-MY | Model BAlphaBot 2 |
|---|---|---|
Functional Utility & Use Cases4 Comparative Metrics | ||
Control Method | Teleoperation, autonomous, learned behaviors | Teleoperation, autonomous, learned behaviors |
Use Cases | Manufacturing, research, logistics, infrastructure inspection, remote operations | Autonomous cooking, sterile filling operations, unpacking and packaging, quality inspection, automotive manufacturing assembly, biotech laboratory tasks, multi-step complex workflows, extended uninterrupted operations in manufacturing environments |
Multi Robot Coord | Multi-robot coordination via network | Not specified | (Inferred · Low confidence · Potential for multi-robot coordination in manufacturing) |
Pet Friendly | Not applicable (research and industrial robot) | Yes, with safety protocols |
Manipulation & Load Capacity4 Comparative Metrics | ||
Carrying Capacity | 15-25 kg per arm | 15-25 kg per arm |
Deadlift Capacity | 50-100 kg | 30-50 kg | (Inferred · Medium confidence · Typical for humanoid robots with 15-25 kg per-arm capacity) |
Payload Type | Tools, sensors, industrial equipment | Tools, sensors, industrial equipment |
Modular Attachments | Tool changers, gripper interfaces, sensor mounts | Tool changers, gripper interfaces, sensor mounts |
Kinematic Architecture & Dexterity4 Comparative Metrics | ||
Degrees of Freedom | 40–45 DOF across legs, arms, torso, and head | 34-40+ DOF (including head, arms with 5-finger hands, legs, torso, waist) |
Material | Aluminum frame, composite joints, polymer covers | Aluminum frame, composite materials, soft materials for safety | (Inferred · Medium confidence) |
Mobility Type | Legged (bipedal walking) | Wheeled |
Hardware Interface | USB-C, Ethernet, GPIO, CAN bus | USB-C, Ethernet, GPIO, CAN bus |
Functional Utility & Use Cases
4 Comparative Metrics
Manipulation & Load Capacity
4 Comparative Metrics
Kinematic Architecture & Dexterity
4 Comparative Metrics
Related Comparisons
Discover similar robot matchups to expand your knowledge and find the perfect solution

KUAVO-MY vs Kaleido 8.0
Compare KUAVO-MY and Kaleido 8.0. Detailed analysis of speed, sensors, navigation, and battery life.

AlphaBot 2 vs Walker Tienkung
Compare AlphaBot 2 and Walker Tienkung. Detailed analysis of navigation, battery, and sensors.

AlphaBot 2 vs Green
Head-to-head: AlphaBot vs Green. Explore differences in AI capabilities, sensor suites, and battery longevity.
KUAVO-MY vs Green
Comparison of KUAVO-MY and Green humanoid robots highlighting AI systems, software ecosystems, and sensor capabilities.
Disclaimer
All content, comparisons, and verdicts on this website are based on our research, testing, and opinion. While we strive for accuracy, we do not guarantee the completeness, reliability, or suitability of any information. Performance, specifications, and results may vary depending on usage and conditions. This website and its authors are not responsible for any decisions, actions, or outcomes based on the information provided. Always verify product details with the manufacturer before making purchase or operational decisions.