CU Boulder's CLARI Secures $2M Grants for Shapeshifting Upgrades (April 2025)
Published
March 18, 2026
Reading Time
3 min read
Author
Origin Of Bots Editorial Team
Funding Boost Arrives
University of Colorado Boulder researchers secured $2 million in grants in April 2025 to advance their CLARI robot's shapeshifting prowess. The funding splits into a $650,000 award from the U.S. National Science Foundation and $1.4 million from the Air Force Research Laboratory, targeting enhancements for the Compliant Legged Articulated Robotic Insect. Led by Assistant Professor Kaushik Jayaram, the team aims to refine this insect-scale machine for extreme environments, building on prior demos where CLARI demonstrated passive body morphing to navigate tight gaps. This investment accelerates development of untethered versions, promising breakthroughs in confined-space operations.
Morphing Mastery Revealed
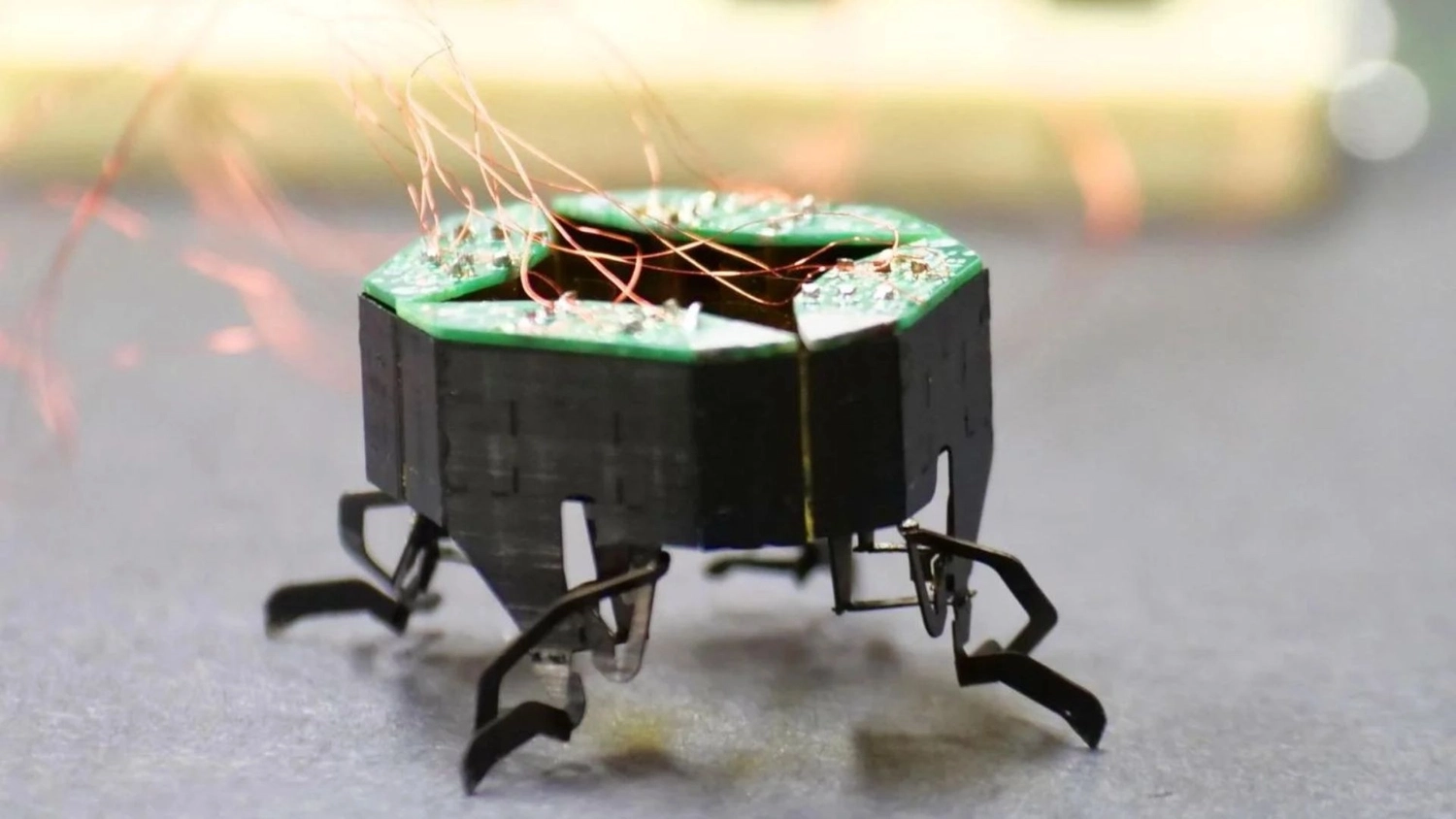
CLARI disrupts rigid robotics norms by passively compressing its frame under lateral pressure, narrowing from a neutral square profile to slip through horizontal constraints. Engineers crafted its flexible outer skin and modular leg units using origami pop-up assembly, enabling seamless shape shifts without active control. Each leg operates independently via custom piezoelectric actuators, delivering eight degrees of freedom for dexterous gaits like trotting or walking at frequencies up to 10 Hz. Recent lab trials showcased CLARI traversing open terrain and constrained passages, a feat that outpaces traditional legged bots stuck in cluttered settings.
Engineering Edges Emerge
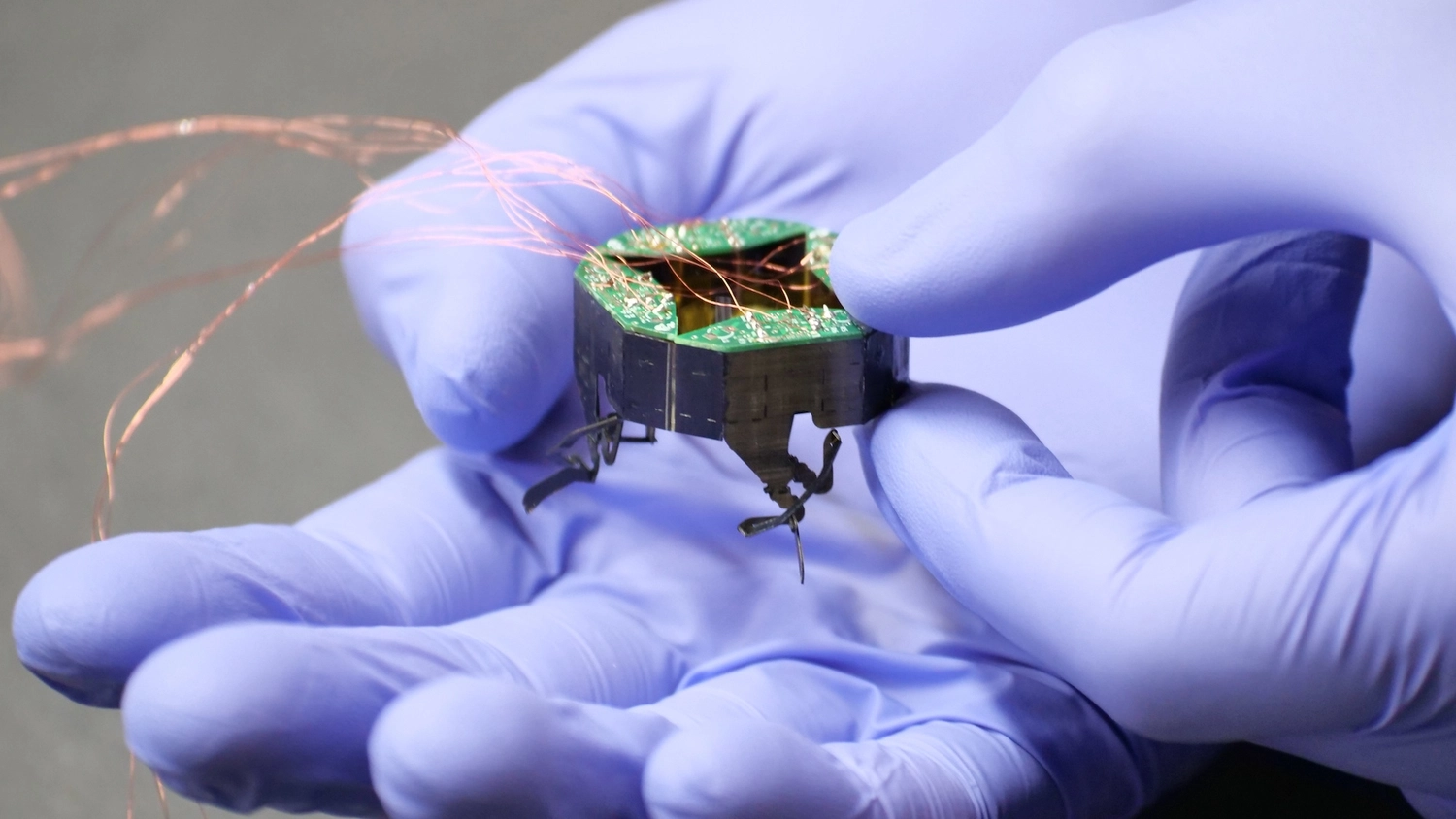
Piezoelectric-driven legs grant CLARI mechanical agility unmatched in insect-scale designs, with laminate fabrication ensuring lightweight durability at just 2.59 grams. The compliant body absorbs forces automatically, preventing jams during exploration, while open-loop control from an external computer directs precise strides. Grant funds will integrate planned 2026 upgrades like obstacle-detection sensors, cameras, and skin-like networks, evolving CLARI toward full autonomy. This modular architecture supports leg customization, potentially spawning spider-like variants for web-climbing or multi-legged stability, redefining adaptability in miniature robotics.
Missions Take Shape
Disaster zones demand CLARI's talents, where it could scout rubble for survivors inaccessible to larger machines, as tested in simulated tight spaces. Machinery inspections in jet engines or pipes benefit from its gap-squeezing ability, while rugged environmental surveys leverage its terrain-adaptive locomotion. Search-and-rescue teams gain a tool for real-time data relay in collapsed structures, and cluttered industrial sites see streamlined maintenance. With funding, deployments in high-stakes scenarios like airplane crawls or pipe networks become viable, transforming how humans probe hazardous realms.

Specs Drive Performance
CLARI measures 3.4 x 3.4 x 2.1 cm in neutral form, compressing to 2.1 cm width for passage through lateral gaps, enabling navigation in spaces mere millimeters wide. At 2.59 grams, its quadrupedal mobility hits 60 mm/s maximum speed in the mCLARI variant, ideal for deliberate cluttered traversal. Tethered operation suits current lab use, with no onboard sensors yet but 2026 plans for cameras and detection arrays. Passive compliance averts entrapment, open-loop control ensures reliable gaits, and custom embedded software offers ROS compatibility, powering inspection-focused missions without payloads.
Sources
Related Articles
RoboBee Masters Crane Fly-Inspired Landings on Rough Terrain

Japan Deploys 330 Robot Wolves Against Bear Surge 2026
Cuddle-Fish Robot Elicits Hugs in Therapeutic Indoor Demos

Mayfield Robotics Shuts Down Kuri Operations October 2018
Learn More About This Robot
Discover detailed specifications, reviews, and comparisons for CLARI (Compliant Legged Articulated Robotic Insect).
View Robot Details →