RoboBee Masters Crane Fly-Inspired Landings on Rough Terrain
Robot Details
RoboBee • Harvard University (Wyss Institute)Published
March 18, 2026
Reading Time
3 min read
Author
Origin Of Bots Editorial Team
Landing Breakthrough Emerges
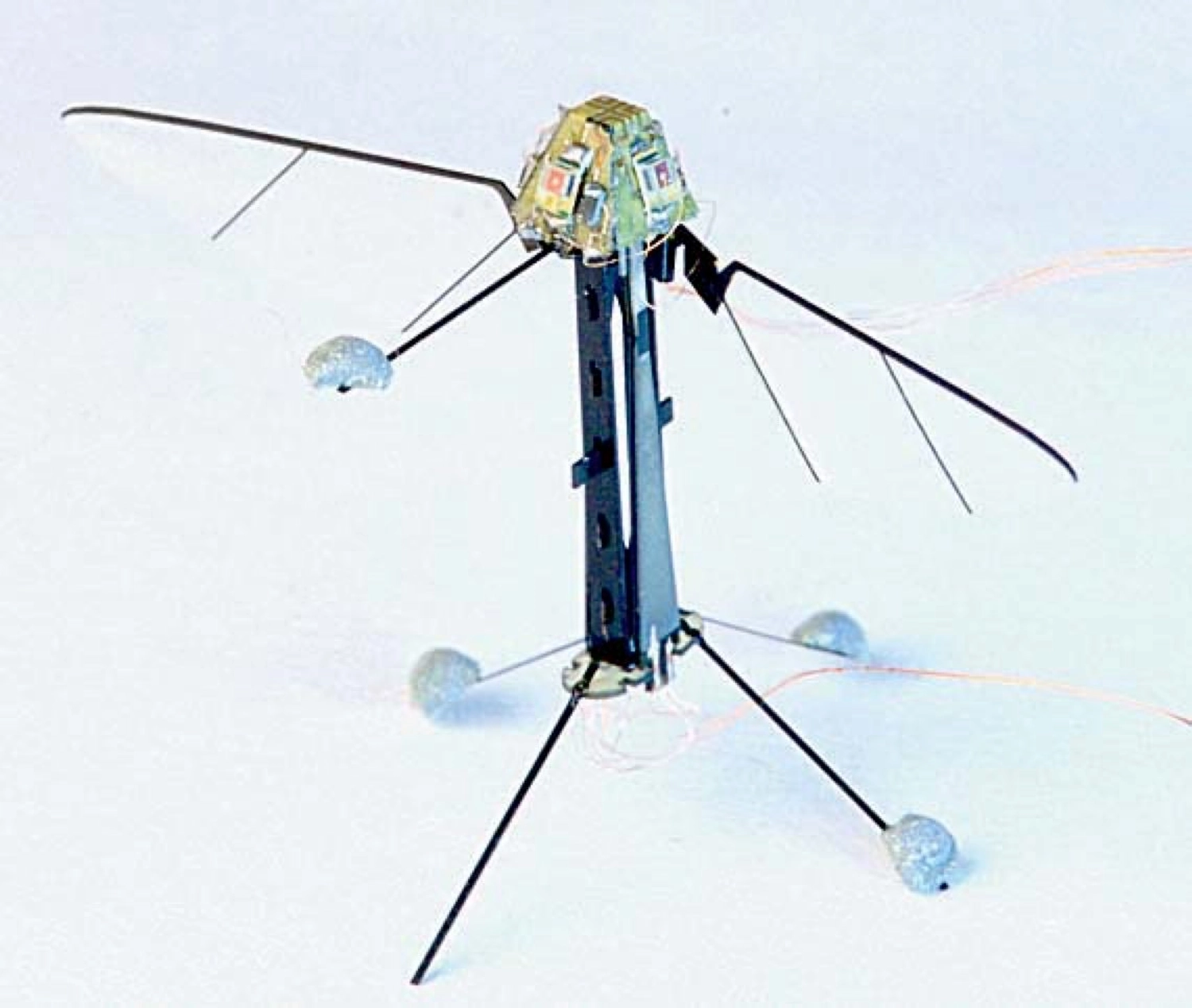
Harvard researchers at the Wyss Institute have transformed the RoboBee's flight profile with crane fly-inspired landing mechanics, enabling stable touchdowns on uneven surfaces as detailed in recent lab tests. This advance, born from studying the slow-moving insect's resilience, overcomes prior instabilities caused by the robot's minuscule size and flapping wings generating disruptive ground effects. Previously, landings risked fracturing delicate piezoelectric actuators, but new mechanical tweaks now shield these energy-dense components during impacts. Conducted in controlled experiments over the past year, this capability marks a pivotal step toward untethered operations, potentially deploying swarms in unpredictable environments without constant supervision.
Bioinspired Flight Upgrades
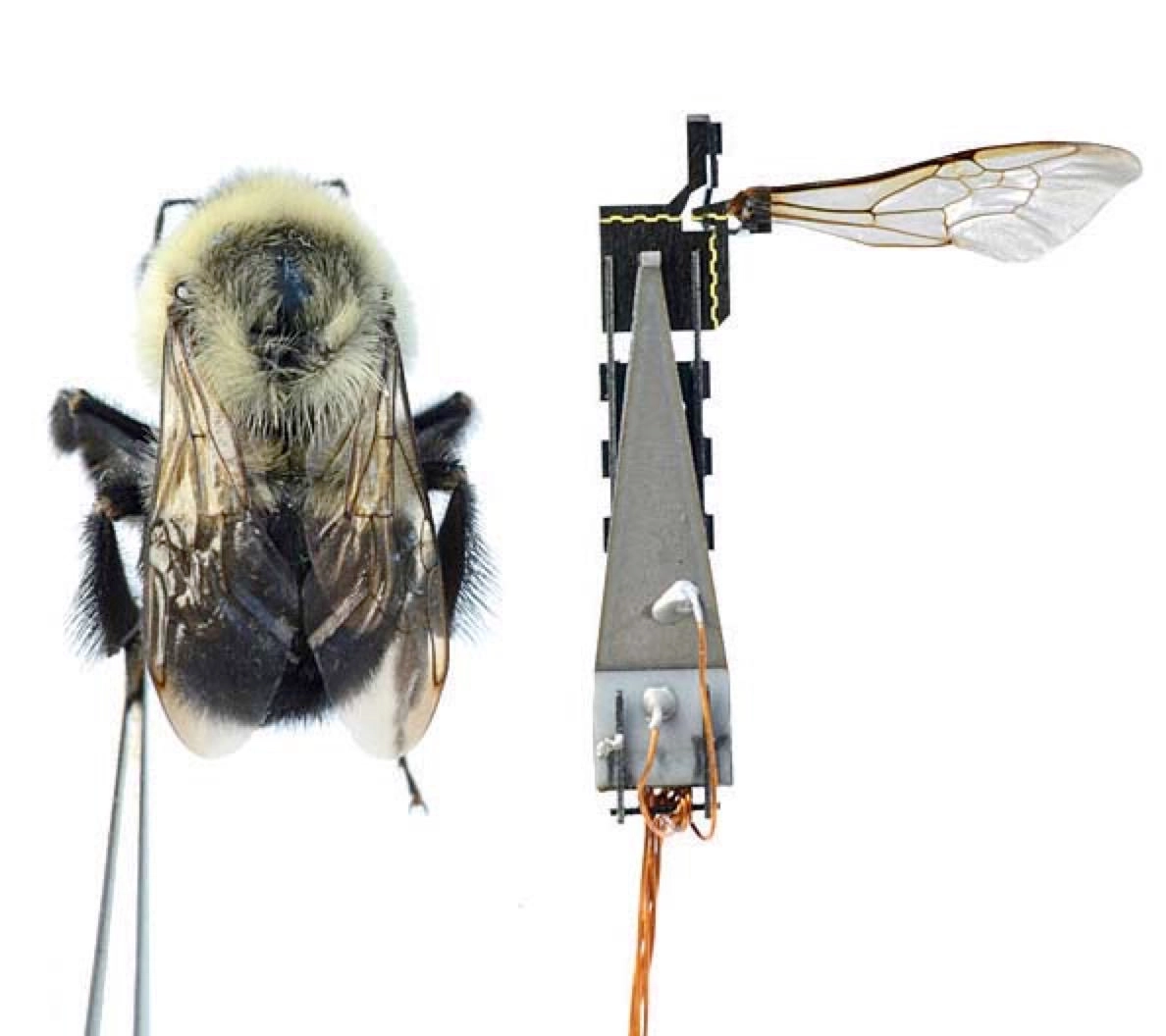
Engineers drew directly from crane fly anatomy to redesign RoboBee's wing and body dynamics, matching the insect's scale for optimal slow-descent control. Postdoctoral biologist Alyssa Hernandez contributed locomotion insights, bridging evolutionary biology with robotics to refine touchdown sequences. These adaptations minimize air vortices that once destabilized the 3-centimeter wingspan platform, allowing precise positioning even on rough terrain like gravel or foliage. The result disrupts traditional microrobot limitations, where fragility halted practical field trials, positioning RoboBee as a frontrunner in bio-mimetic agility.

Engineering Stability Wins
Custom upgrades include real-time wing modulation to counter turbulence, paired with a bespoke microprocessor that stabilizes pitch and yaw mid-descent. Piezoelectric actuators, vulnerable to shocks, now benefit from protective structures mimicking crane fly exoskeletons. This tethered system's success in lab demos paves the way for onboard autonomy, addressing power and control tethers that previously impeded free flight. Robert Wood's team emphasizes how these mechanical innovations expand microrobotics boundaries, enabling operations in windy or cluttered spaces long deemed impossible.
Deployment Scenarios Expand
With reliable landings secured, RoboBee swarms could infiltrate disaster zones for survivor detection or monitor pollutants in rugged wilderness, perching post-flight to conserve energy. Artificial pollination in orchards gains traction, as stable terrain contact allows precise flower targeting without tether drag. Surveillance in tight urban crevices or coordinated environmental sampling also benefits, transforming theoretical concepts into deployable assets. Recent trials highlight how this landing prowess enables distributed networks, revolutionizing access to hazardous or remote locales.
Core Specs Empower Missions
RoboBee's compact form factors 1.6 cm in height with a 3 cm wingspan, weighing 80 mg tethered, 175 mg for hybrid aquatic variants, and 259 mg untethered X-Wing style, while achieving speeds of 3.6 km/h (1 m/s). Sensors like gyroscopes, optical flow for visual navigation, ocelli for horizon detection, accelerometers, magnetometers, and IMUs drive inertial stability, currently via teleoperation. Payloads support environmental monitors or solar cells, with software on a custom system-on-chip ensuring ultra-low power flight control. These specs enable flapping-wing aerial mobility resilient to rough landings, tying directly to search-rescue endurance and pollination precision.
Sources
Related Articles

Mi-Mo Developer Kit Opens Waitlist for AI Robot Customization

AmphiBot IV Deploys Pollution Sensors in Lakes 2026

Pleurobot Masters 30-Degree Slopes, Swimming in 2026 Trials

Octobot Powers Soft Robotics with 4-8 Minute Chemical Autonomy
Learn More About This Robot
Discover detailed specifications, reviews, and comparisons for RoboBee.
View Robot Details →