ROBOTIS introduces AI Sapiens K0 as an open humanoid platform for Physical AI
Robot Details
AI Sapiens K0 • ROBOTISPublished
June 8, 2026
Reading Time
3 min read
Author
Origin Of Bots Editorial Team
Humanoids Get Practical
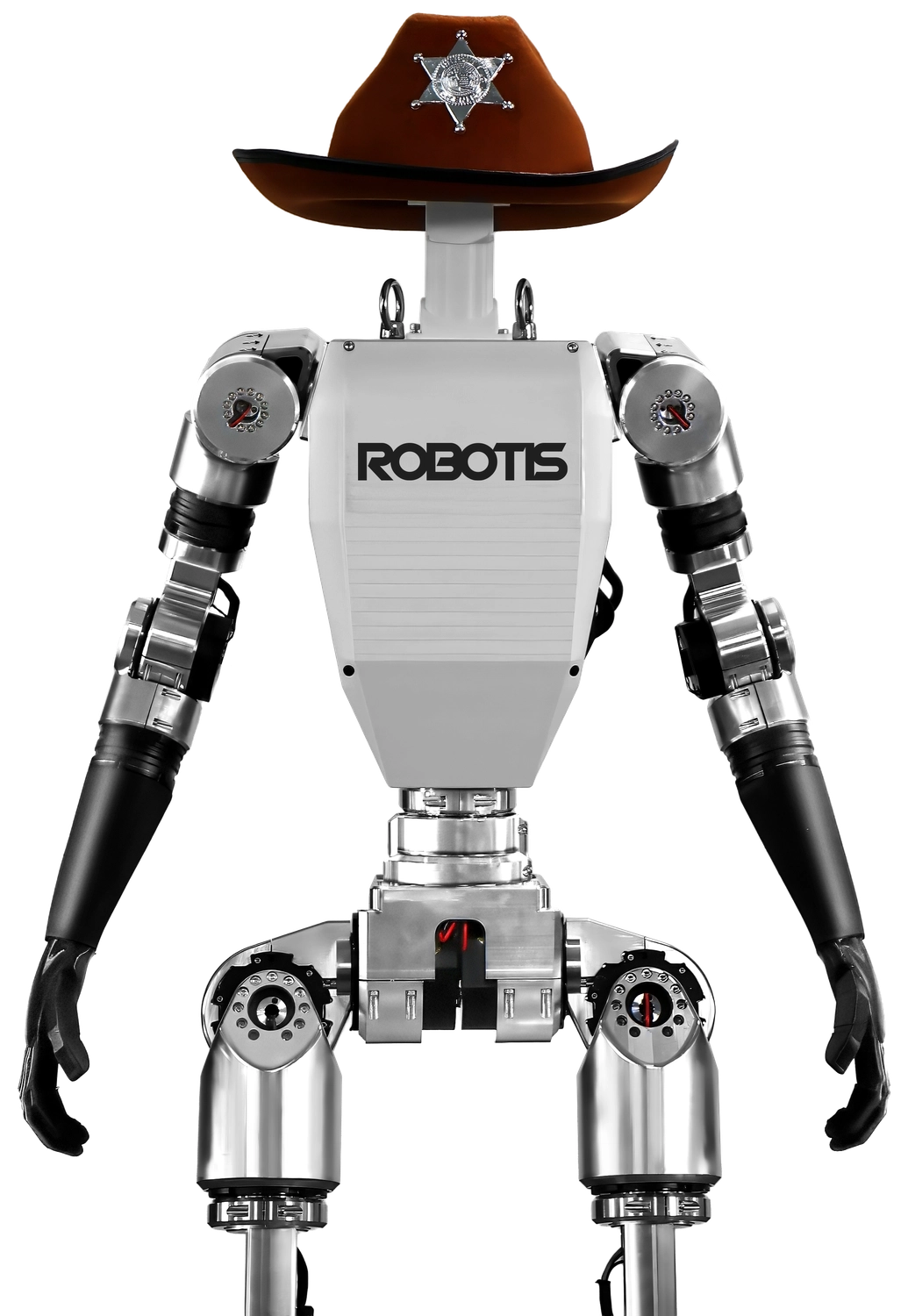
Humanoid robots are being pushed toward tasks that require balance, whole-body coordination, and human-space interaction, where teleoperation and imitation learning can matter more than autonomous navigation. ROBOTIS has now introduced AI Sapiens K0, a 1.3-meter humanoid platform built on DYNAMIXEL-Q and presented as an open development base for Physical AI, with demos showing full-body motion learning and execution.
Why This Platform Matters
K0 matters because it is framed less as a finished consumer robot and more as a reproducible research and development platform for real hardware deployment. ROBOTIS ties the system to imitation learning, reinforcement learning, simulation workflows, and open documentation, which lowers friction for teams that need to move from policy training to physical execution on a humanoid body. Its open-stack positioning also makes the platform more relevant for teleoperation-first use cases, where the core challenge is coordinated motion rather than unattended autonomy. K0’s main value is not autonomy, but a shared hardware-and-software starting point for embodied control research.

Motion To Motion
In ROBOTIS’ framing, the system flow is human motion input, AI model processing, then joint actuation with balance correction. That matters because the demos center on full-body motions such as walking, running, balancing, and text-driven movement generation, all of which depend on translating intent into coordinated leg, arm, and torso control rather than a single isolated action.
Teleoperation In Human Spaces
The most realistic deployment scenario for K0 is teleoperation inside human-centric spaces such as labs, service areas, or controlled inspection environments. In those settings, the robot’s value comes from a human operator steering full-body actions while the platform handles balance, timing, and manipulation, which is exactly the class of problem humanoids are built to address. ROBOTIS’ own positioning emphasizes real-world deployment alongside simulation and learning pipelines, rather than a purely scripted motion library.

Specs With Purpose
K0 is reported as 130 cm tall and 34 kg, a size and mass profile that supports humanoid experimentation without moving into full-scale industrial heft. The platform is also described with 23 degrees of freedom, including 5 in each arm, 6 in each leg, and 1 in the waist, which gives it the joint range needed for coordinated humanlike movement. ROBOTIS also lists a maximum arm payload of 3 kg, Jetson Orin NX 16GB compute, and open connectivity and power interfaces, all of which point to a robot designed for software iteration, not just a static demo.
Rivals Edge Check
| Robot | Key Advantage | Where AI Sapiens K0 Wins | Target Use |
|---|---|---|---|
| E1 | Compact humanoid form factor for research workflows | More explicit open-source stack and Physical AI workflow | Research and teleoperation |
| N2 (Athlete) | Faster motion focus and athletic demonstrations | More developer-oriented hardware and software openness | Motion research |
| K1 Professional Humanoid | Professional positioning for advanced humanoid work | More transparent platform framing and open tooling | Lab and applied robotics |
| 4NE-1 Mini | Smaller-scale humanoid exploration | Larger baseline body and stronger full-body coordination focus | Education and controlled demos |


What The Market Signals
K0’s debut reinforces a market pattern in which humanoid robotics is moving toward reproducible pipelines that combine simulation, motion retargeting, and learning-based control. The competitive advantage is increasingly about who can make human motion easier to capture, adapt, and deploy on hardware, not just who can produce the most dramatic walk cycle.
Related Articles

Galbot positions S1 for heavy factory work as wheeled humanoids push into production-line deployment

ChangingTek Robotics’ Universal Wheeled Humanoid Robot points to teleoperation-first humanoids for human workspaces

Muks Robotics’ Spaceo Pro pushes humanoid robots toward teleoperation-first industrial work
Muks Robotics’ Spaceo M1 Pushes a Teleoperation-First Humanoid Into Service Roles
Related Comparisons
Compare AI Sapiens K0 with similar robots

GR-1 vs Unitree H1-2
Head-to-head: GR-1 vs Unitree H1-2 compared on bipedal balance, AI learning, and real-world deployment for research and care.


Titan 01 vs CyberOne 2026 Version
Which humanoid robot is better? Titan 01 vs CyberOne 2026 Version compared for dexterity, AI capabilities, and price.


NEO Home Robot vs ELIXIS
NEO Home Robot or ELIXIS? See which humanoid robot performs better for manufacturing, logistics, and research.


Sophia vs Aria - Robot Girlfriend
Head-to-head: Sophia vs Aria - Robot Girlfriend compared on bipedal balance, AI learning, and real-world deployment.
Learn More About This Robot
Discover detailed specifications, reviews, and comparisons for AI Sapiens K0.
View Robot Details →