
BionicTurtleWalker
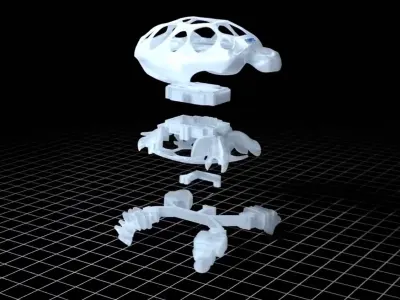
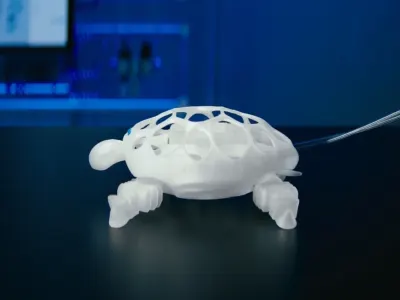
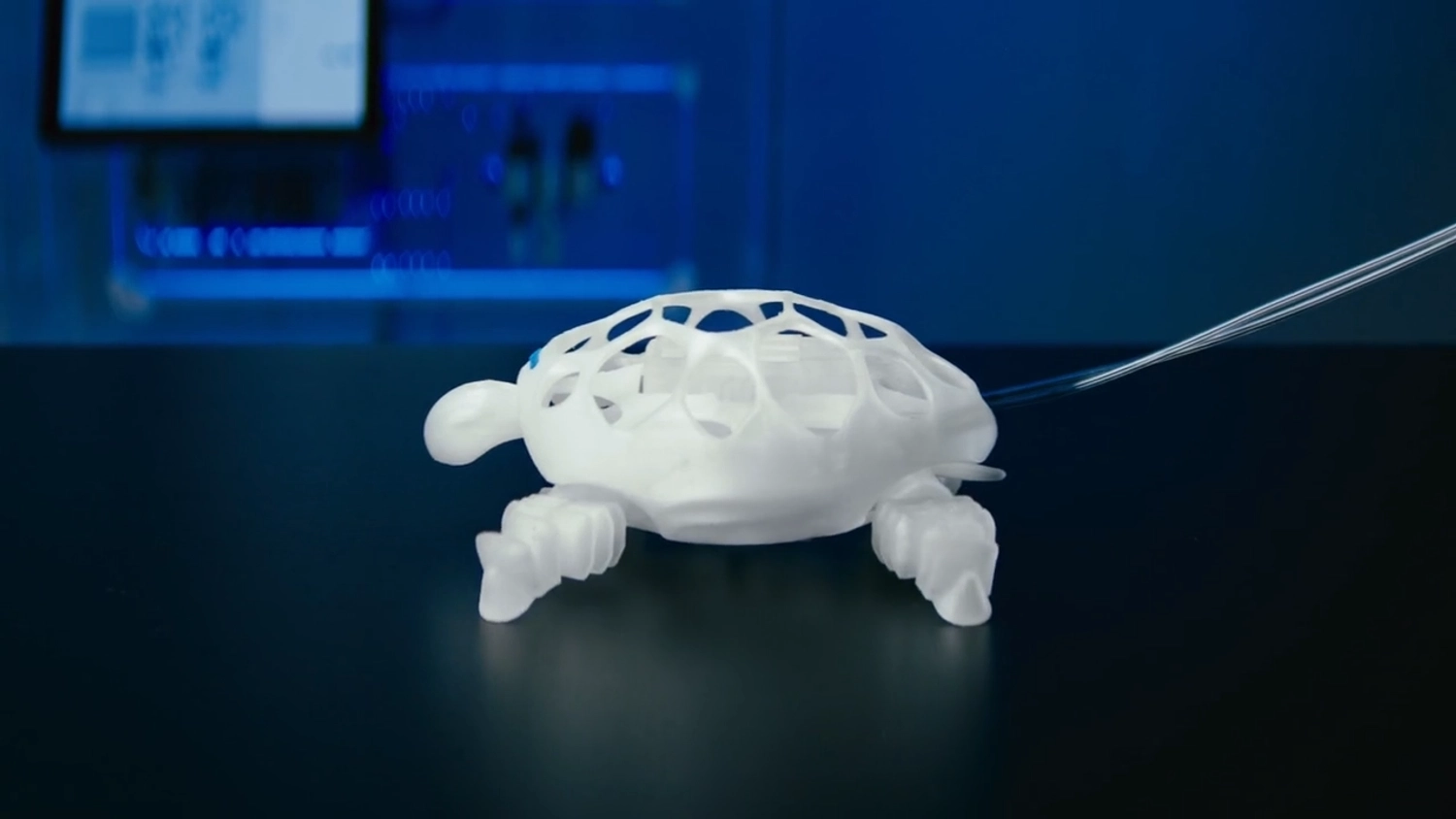
The BionicTurtleWalker is a specialized bionic walking robot inspired by turtle locomotion, developed as a research prototype within Festo's Bionic Learning Network. Its core features a pneumatic logic module made of polyurethane that enables walking motion solely through air pressure application (2 bar) to an elastic, 3D-printed structure, mimicking soft robotics principles without complex electronics. Designed modularly with functional pneumatic components separate from form-giving shell (carapace), it demonstrates novel pneumatic actuation for legged mobility in potential applications like educational demonstrations, soft robotics research, or adaptive locomotion in uneven terrains such as research labs or controlled outdoor environments. Displayed at Hannover Messe 2025, it highlights sustainable, recyclable design from a single material, advancing biomimicry for future automation technologies.
Robot Specifications
Image Gallery
Below images are from Festo's official sources

Review Videos
Watch expert reviews and demonstrations of this robot



More Robots from Festo
Explore other robots from this manufacturer


Latest News About BionicTurtleWalker
Stay updated with the latest articles and developments
Festo's BionicTurtleWalker Demonstrates Pneumatic Logic Without Electronics or Batteries
Soft robotics researchers face a persistent challenge: how to build autonomous systems that operate reliably without complex electronics, power management, or traditional control systems. Festo, the German automation specialist, has demonstrated a potential answer with the BionicTurtleWalker, a 3D-printed walking robot that uses a pneumatic logic module to coordinate leg movement without batteries, microcontrollers, or electrical components. The robot, developed in collaboration with the Plant Biomechanics Group at the University of Freiburg, represents a shift toward material-based computation in bioinspired robotics, where the robot's physical structure itself performs the logic required for coordinated movement.
More Robots
Discover more robots in the same category




Robots From Other Categories
Discover complementary robots from different categories that work well together




Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is BionicTurtleWalker and what specific problem or task is it designed to solve?
BionicTurtleWalker is a walking robot developed by Festo, inspired by the locomotion of tortoises. It demonstrates a fully pneumatic walking mechanism without electronics, batteries, or gears, addressing challenges in creating simple, low-cost soft robotics for basic locomotion tasks.
Q2. What are the core capabilities and standout features of BionicTurtleWalker?
The robot moves by alternately pushing diagonally positioned legs downward using compressed air, mimicking tortoise gait. It is 3D-printed entirely from thermoplastic polyurethane (TPU), features a pneumatic logic module that withstands up to 900 kg surface load, and operates with low pneumatic pressure.
Q3. Who uses BionicTurtleWalker, and which industries or sectors benefit from it?
BionicTurtleWalker serves as a research platform within Festo's Bionic Learning Network. Its pneumatic logic modules benefit automation sectors by enabling control of grippers or integration into deflectors, particularly in soft robotics and pneumatic systems research.
Q4. Is BionicTurtleWalker a commercially available product, or is it still a research prototype?
BionicTurtleWalker is a research prototype from Festo's bionic development program. No information indicates commercial availability; it functions as a technology demonstrator for pneumatic logic concepts.
Q5. How does BionicTurtleWalker operate autonomously, and what level of human oversight is required?
It achieves autonomous walking through an integrated pneumatic logic module that sequences leg movements with compressed air supply. Human oversight is needed to provide and regulate pneumatic pressure, as no onboard power or control electronics are present.
Q6. What sensors, AI, and navigation technology does BionicTurtleWalker use?
BionicTurtleWalker uses no sensors, AI, or electronic navigation technology. Locomotion relies solely on a passive pneumatic logic module developed with the University of Freiburg, directing air flow for alternating leg actuation.
Q7. How does BionicTurtleWalker compare to similar robots or competing solutions in its category?
Unlike electronically driven walking robots, BionicTurtleWalker eliminates batteries, gears, and electronics through full pneumatic operation and single-material 3D printing. This reduces complexity and costs compared to hybrid soft robots, though limits speed and adaptability.
Q8. What are the known limitations, trade-offs, or challenges of using BionicTurtleWalker?
It requires continuous compressed air supply, restricting untethered operation. Speed and terrain adaptability are constrained by pneumatic actuation, and scalability depends on combining modules, potentially increasing system complexity.
Q9. What does it cost to acquire or deploy BionicTurtleWalker, and what is the expected ROI?
No public pricing information exists for BionicTurtleWalker as a research prototype. Festo states its design lowers production and operating costs via additive manufacturing and low-pressure pneumatics, but specific ROI data is unavailable.
Q10. What is the future roadmap or planned improvements for BionicTurtleWalker?
Festo positions the pneumatic logic module for broader applications like gripper control or multi-module systems. No specific roadmap is detailed, but it aligns with ongoing bionic research for energy-efficient, adaptive material systems.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.