
Pleurobot
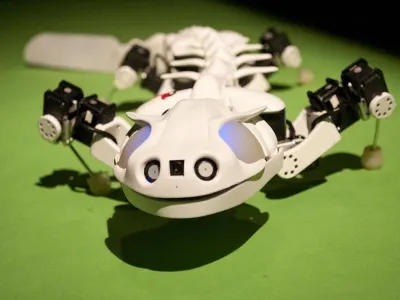
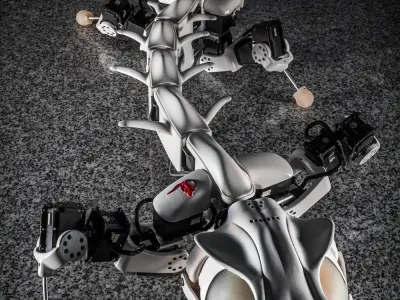
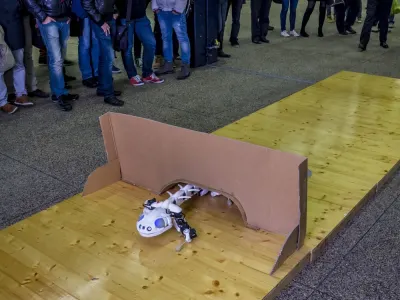
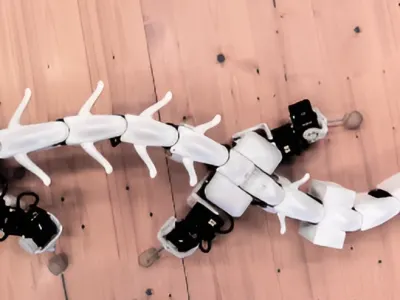
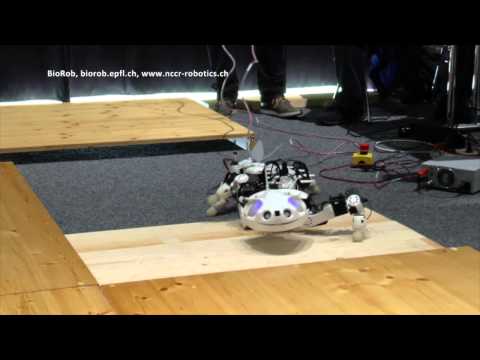
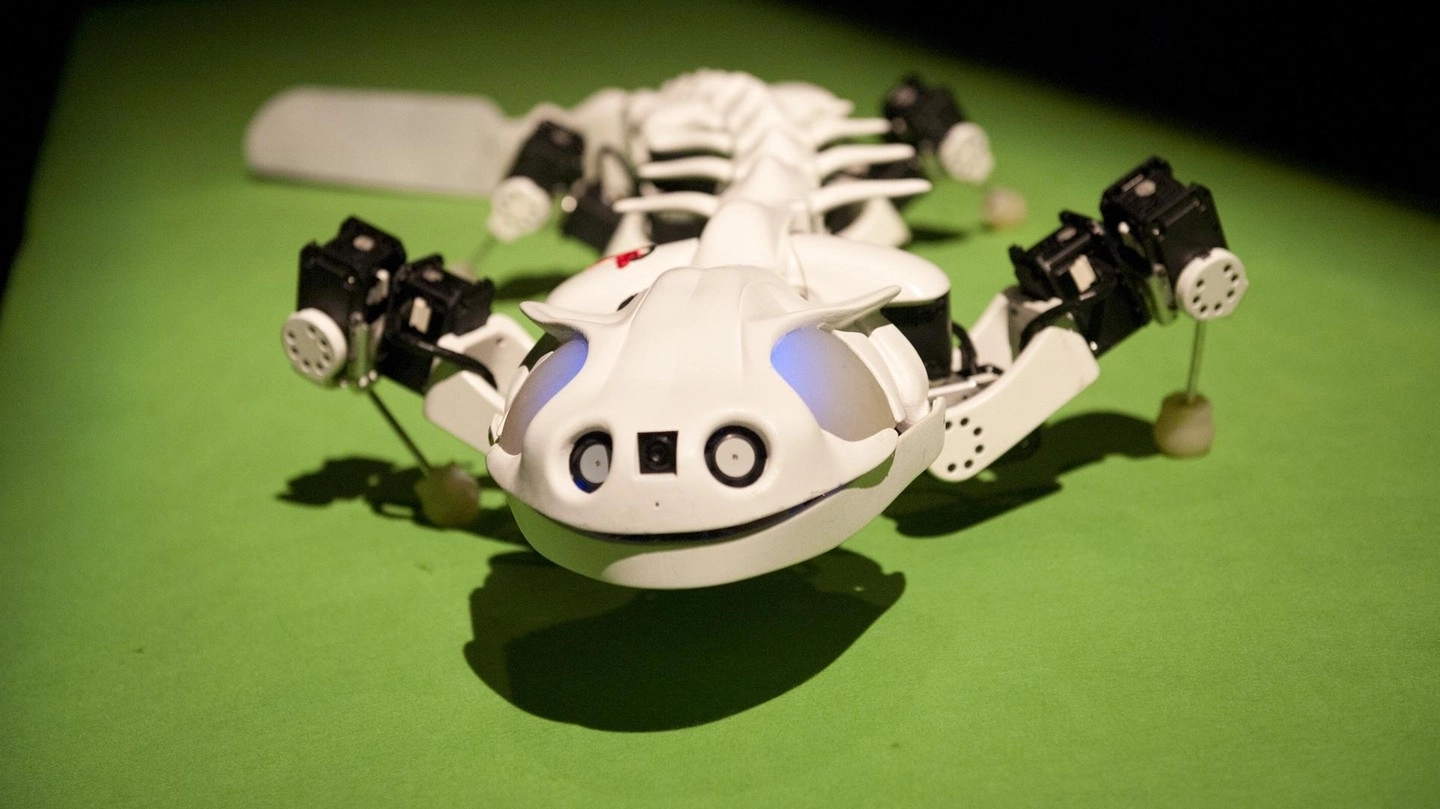
Pleurobot is a bio-inspired amphibious robot developed by EPFL's Biorobotics Laboratory to mimic the locomotion of the salamander Pleurodeles waltl, aiding research in vertebrate motion, spinal cord control, and robotics for search and rescue. Featuring 27 motors, 11 spinal segments, 29 joints (including 2 passive in tail), and 3D-printed bones, it replicates walking, crawling, forward/backward/lateral terrestrial movement, turning via spine bending, surface swimming, and slope traversal up to 30 degrees. Used for studying central pattern generators (CPGs), reflexes like leg extension and stumble correction, and multimodal locomotion; potential applications in disaster response terrain navigation and neurorehabilitation insights for paraplegics
Robot Specifications
Image Gallery
Below images are from EPFL's official sources




Review Videos
Watch expert reviews and demonstrations of this robot



More Robots from EPFL
Explore other robots from this manufacturer

Latest News About Pleurobot
Stay updated with the latest articles and developments
Pleurobot Masters 30-Degree Slopes, Swimming in 2026 Trials
Engineers at EPFL's Biorobotics Laboratory pushed Pleurobot through rigorous 2026 trials in March, where the salamander-inspired robot scaled 30-degree slopes with steady precision while seamlessly transitioning to swimming modes. These tests, conducted on uneven terrain mimicking disaster zones, showcased the robot's evolved reflexes for real-time gait adjustments, proving its resilience beyond lab confines. What stands out is how Pleurobot disrupts traditional robotics by blending vertebrate mimicry with practical amphibious prowess, offering fresh data on spinal cord dynamics amid growing demands for versatile rescue tech.
More Robots
Discover more robots in the same category



Robots From Other Categories
Discover complementary robots from different categories that work well together




Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is Pleurobot, and what problem is it designed to solve?
Pleurobot is a salamander-inspired robot developed by EPFL's Biorobotics Laboratory. It addresses challenges in understanding vertebrate locomotion by replicating the 3D skeletal movements of the Spanish ribbed newt, Pleurodeles waltl, for neuroscience and biomechanics research.
Q2. What are the main capabilities and key features of Pleurobot?
Pleurobot demonstrates multimodal locomotion including terrestrial walking, crawling on uneven terrain, and surface swimming. Key features include a 3D-printed skeleton, motorized joints, and a control system mimicking neural spinal cord signals.
Q3. Who is Pleurobot built for, and which industries can benefit from it?
Pleurobot serves researchers in neurobiology, biomechanics, functional morphology, and paleontology. It provides roboticists with a platform to test locomotor models, with potential applications in search-and-rescue robotics.
Q4. Is Pleurobot a commercial product or still a research prototype?
Pleurobot remains a research prototype developed by EPFL's Biorobotics Laboratory. It functions as a physical interface for studying vertebrate nervous systems rather than a market-ready device.
Q5. Is Pleurobot currently available for purchase, and when is it expected to ship?
Pleurobot is not available for purchase. As a laboratory prototype, no commercial shipping timeline has been announced by EPFL.
Q6. How does Pleurobot actually work in real-world environments?
Pleurobot navigates real-world environments using bioinspired spinal undulation combined with leg motions for walking, crawling over obstacles, and surface swimming. It relies on optimization from X-ray tracked animal data for gait replication.
Q7. When was Pleurobot announced or officially launched?
Pleurobot was presented by EPFL researchers around 2013. Development stemmed from cineradiography studies of salamander locomotion conducted by the Biorobotics Laboratory.
Q8. How is Pleurobot different from other robots in the same category?
Unlike prior bioinspired robots, Pleurobot uses 3D X-ray videos to track 64 skeletal points, enabling precise replication of salamander gaits in three dimensions through a simplified yet motorized bone structure.
Q9. Does Pleurobot require additional development or customization after purchase?
As a non-commercial research prototype, Pleurobot requires ongoing development by researchers. No purchase process exists, and adaptations occur within EPFL's laboratory for specific locomotor studies.
Q10. What is the future roadmap or planned upgrades for Pleurobot?
EPFL aims to enhance Pleurobot for multimodal locomotion including subaquatic swimming and advanced reflexes like stumble correction. Plans target richer motor skills through refined neural control models.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.