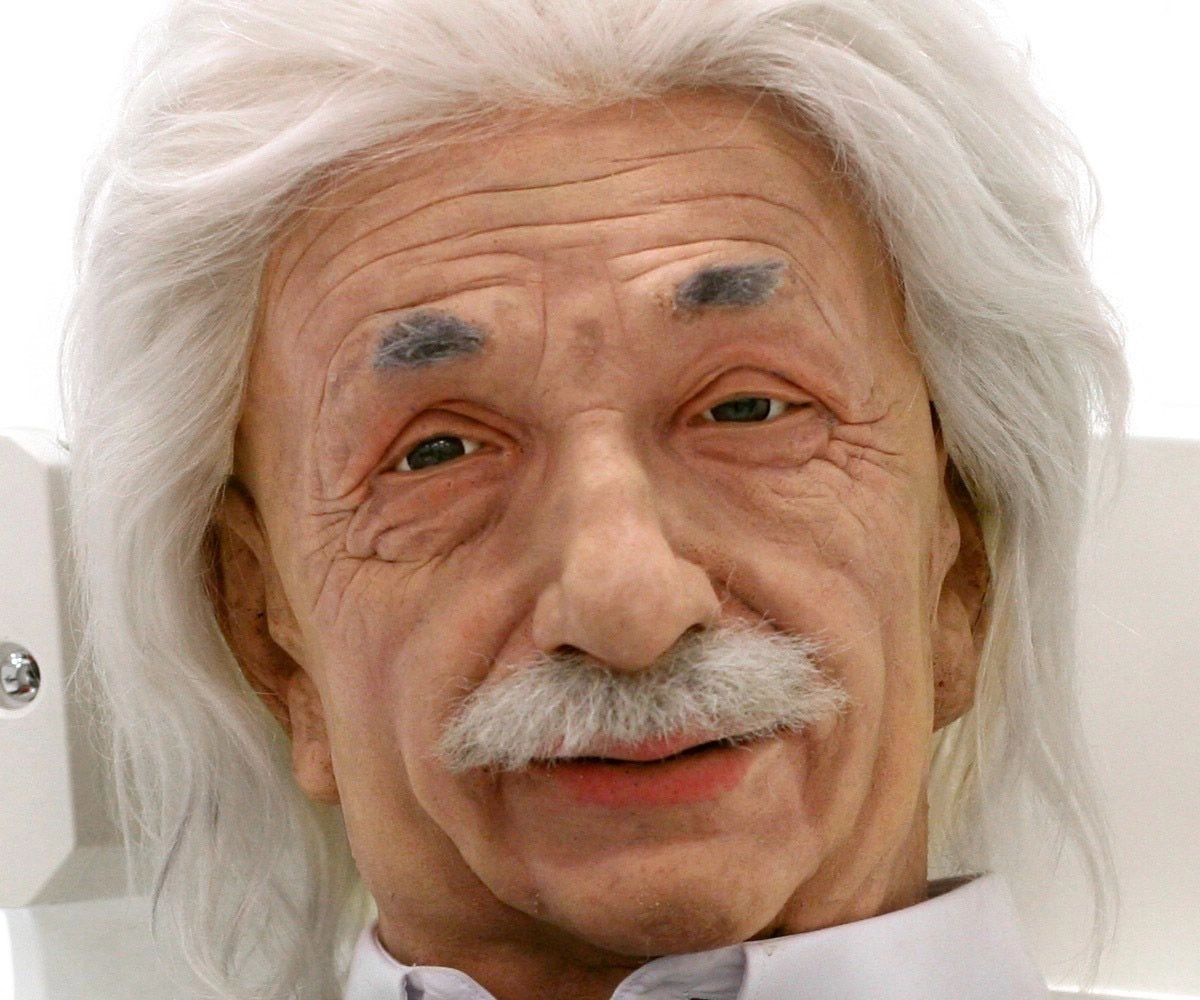
Albert HUBO showed how a humanoid can pair a lifelike head with bipedal motion in a research platform built for human interaction
Robot Details
Albert HUBO • Hanson RoboticsPublished
May 25, 2026
Reading Time
3 min read
Author
Origin Of Bots Editorial Team

A walking face
Albert HUBO addressed one of humanoid robotics’ hardest problems, combining balance, motion, and human-like expression in a single machine. Built by Hanson Robotics with KAIST’s Hubo team, the robot was demonstrated as a walking biped with an expressive Einstein likeness, a setup intended to explore how people respond to robots that can move and gesture in a more natural way.
Why it stood out
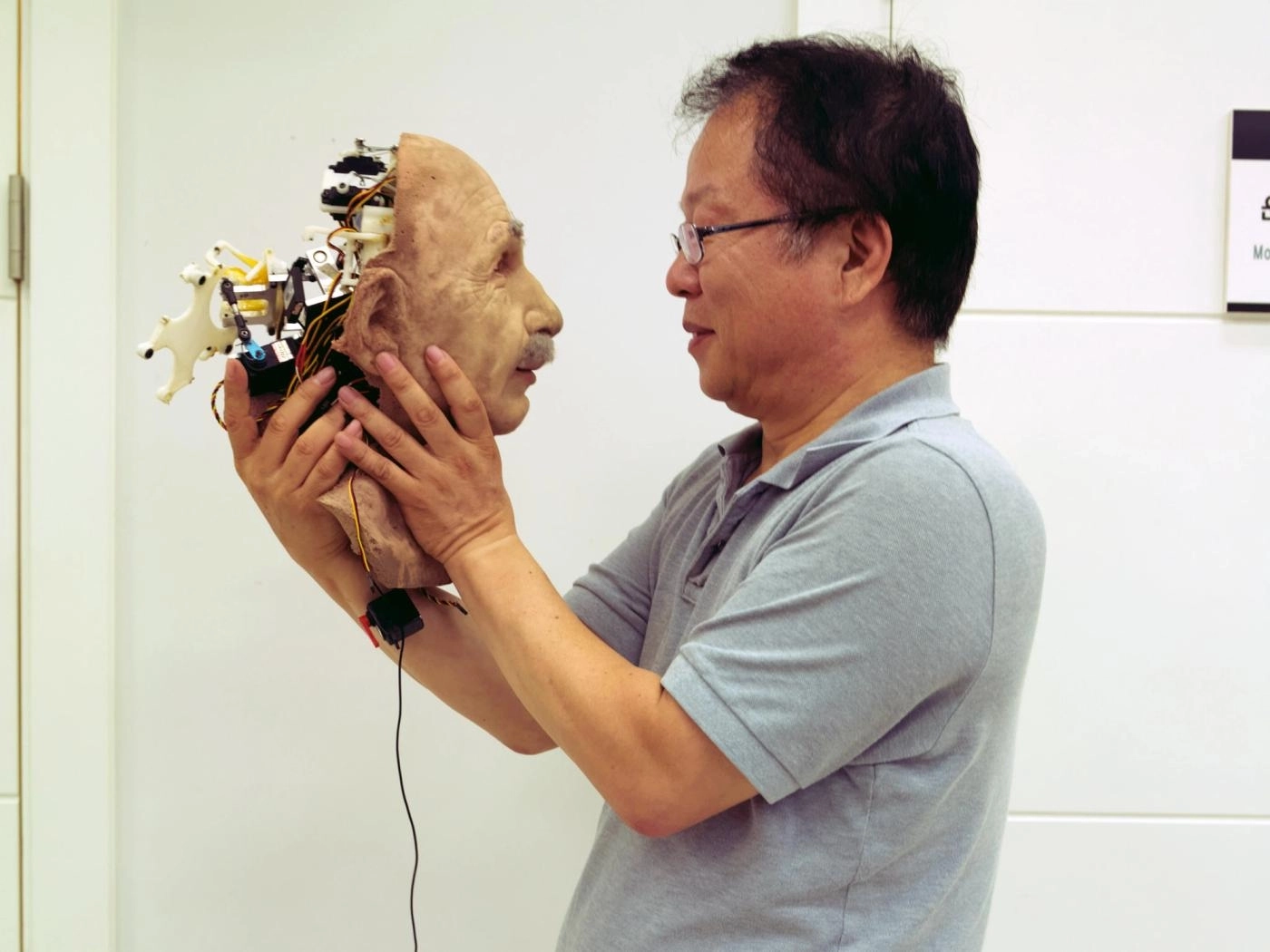
What made Albert HUBO notable was not raw autonomy, but the way it blended full-body walking with a highly expressive upper body for human-robot interaction research. Reports and official material describe a platform with two cameras, inertial sensing, foot-force sensing, and enough joint complexity to support precise gestures, sign-language-style hand movement, and controlled balance correction. That combination made it especially useful for studies in social AI, edutainment, and museum-style demonstrations where human presence matters as much as locomotion. Its design also reflected an early industry idea that humanoids may progress first through teleoperation and guided interaction, not through fully independent behavior. Albert HUBO’s value lay in making motion and expression work together, not in pretending to be autonomous.
How it worked
The system flow was straightforward: human motion input, or preprogrammed operator commands, went into onboard control software that processed posture and balance, then sent actuation commands to the joints while correcting for stability in real time. In practical terms, the robot relied on IMU-based balancing and foot sensors to keep its center of gravity aligned as it walked, which let it perform controlled indoor demos without depending on a full navigation stack. That architecture fits a humanoid built for interaction first, where the challenge is keeping a human-shaped body upright while it gestures, turns, and steps.
Museum-floor use
A realistic deployment for Albert HUBO is a science museum or public demonstration space, where an operator can use the robot to greet visitors, point, wave, and perform carefully staged walking sequences. In that setting, the value is not high-speed mobility but the combination of recognizable human cues and predictable motion, which makes the robot easier for audiences to understand. The platform’s interaction focus also reduces the gap between robotics research and public engagement, since visitors see balance control, gesture timing, and facial expression in one system.
Capabilities in view
The robot was reported at 137 cm tall and 57 kg, a size that helps explain why it could be shown in human-centered spaces without looking like a full-scale industrial machine. Its sensor set, including two cameras, a gyroscope, an accelerometer, and a three-axis foot sensor, supported the balance and perception needed for walking and gesture work. Publicly described operating software from the period was based on proprietary real-time control rather than modern open robotics stacks, which fits the era in which it was developed. The modest top speed, about 1.37 km/h, reinforces that Albert HUBO was built for careful interaction rather than fast mobility.
Rivals Edge Check
| Robot | Key Advantage | Where Albert HUBO Wins | Target Use |
|---|---|---|---|
| HRP-3 | Strong Japanese full-body humanoid research lineage | More recognizable facial expression and stronger public-facing persona | Bipedal research and demos |
| Phantom MK1 | Newer teleoperation-oriented humanoid design | Earlier proof that expression and walking can coexist in one research platform | Human-in-the-loop control |
| Galbot G1 | Modern manipulation and task execution focus | More distinctive human-like presentation for audience-facing interaction | Service and inspection tasks |
| MH3 | Motion and body-control emphasis | Stronger facial expressiveness and social-robot identity | HRI labs and museum demos |




Industry direction
Albert HUBO also points to a wider industry shift now visible across humanoid robotics: builders are increasingly treating teleoperation, guided motion, and human-centric environments as the first commercial footholds. That matters because the hardest parts of humanoid deployment are often not raw walking performance, but safety, timing, and the social acceptability of a machine operating near people. In that sense, Albert HUBO looks less like a finished product than an early marker of where humanoids found practical value first.
One Robot
Infinite Possibilities
One Robot
Infinite Possibilities

TP-01 by Raydiculous
Sources
Related Articles

Hanson Robotics’ Eva remains a research humanoid built for interaction, not autonomy

Hanson Robotics’ Bina48 remains the company’s most unusual face-to-face AI experiment

RobotGym’s Qijia Q1 pushes eldercare humanoids toward teleoperation-first service
Tesla’s Optimus Gen 3 points to teleoperation-first humanoids as production nears
Related Comparisons
Compare Albert HUBO with similar robots


Sophia vs Aria - Robot Girlfriend
Head-to-head: Sophia vs Aria - Robot Girlfriend compared on bipedal balance, AI learning, and real-world deployment.


NEO Home Robot vs ELIXIS
NEO Home Robot or ELIXIS? See which humanoid robot performs better for manufacturing, logistics, and research.

Figure 03 vs VR-H3
Which humanoid robot is better? Figure 03 vs VR-H3 compared for dexterity, AI capabilities, and price.


Unitree G1 vs Unitree H2
In-depth comparison of Unitree G1 and Unitree H2, covering hardware capabilities, teleoperation, and enterprise readiness.
Learn More About This Robot
Discover detailed specifications, reviews, and comparisons for Albert HUBO.
View Robot Details →