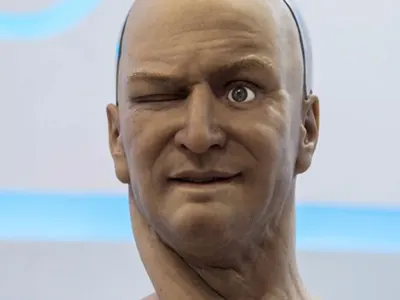
Hanson Robotics’ Eva remains a research humanoid built for interaction, not autonomy
Robot Details
Eva • Hanson RoboticsPublished
May 25, 2026
Reading Time
3 min read
Author
Origin Of Bots Editorial Team

Research First, Then Demo
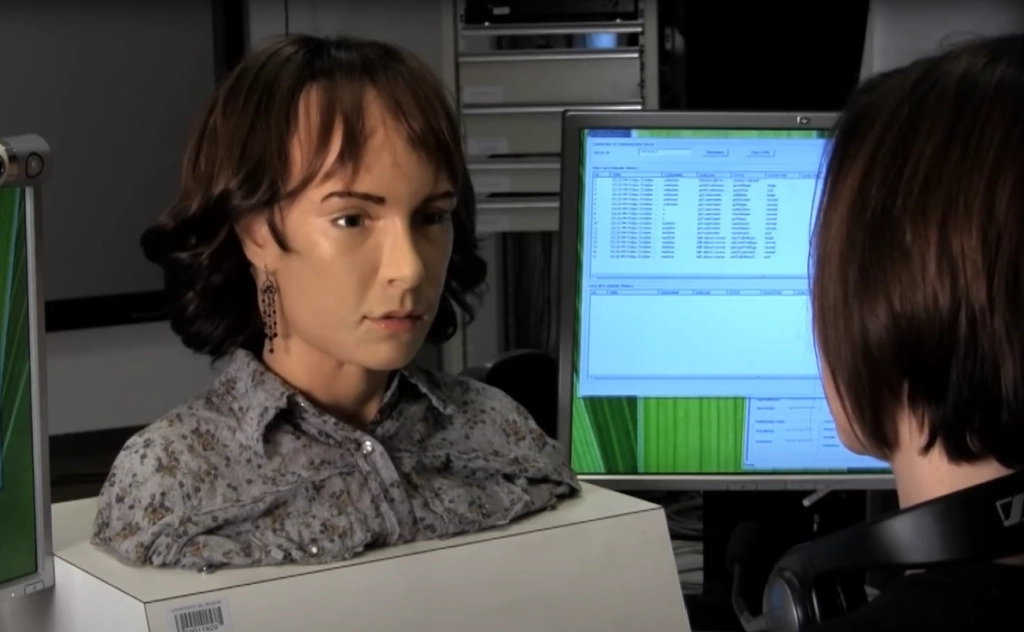
Hanson Robotics’ Eva is a humanoid robot built for cognitive robotics research and social interaction studies, with public material showing it as part of the company’s broader push into expressive, human-facing machines. The available record ties Eva to Hanson’s work on emotionally expressive robotic heads and social robots, and positions it as a platform for studying how people respond to lifelike machines in controlled settings.
Why Eva Stands Out
Eva matters because humanoids are being judged less by raw locomotion alone and more by how naturally they coordinate full-body motion, interact with people, and support teleoperation in human-centric spaces. In that context, Eva sits in a category defined by balance correction, real-time motion imitation, and face-to-face studies of robot behavior, rather than warehouse-style autonomy. Its value is in the interaction layer: how a humanoid can be used to test communication, presence, and operator-guided movement without pretending to be a fully independent machine. Eva is best understood as a platform for studying human-robot trust, not a finished labor replacement.
Motion In, Motion Out
The system flow for a humanoid like Eva is straightforward: human motion input goes into AI processing, and the robot then drives joint actuation while continuously correcting balance. Hanson’s robotics stack is associated with ROS and proprietary AI, which fits a research workflow where camera data, inertial sensing, and force feedback help the robot respond to its environment. In practical terms, that means the machine is designed to turn operator intent into coordinated movement, while keeping the body upright and the motion socially legible.
Human-Centered Trials
The most realistic deployment scenario for Eva is a controlled research lab or demonstration space where people study how a humanoid behaves during guided interaction. That fits the robot’s stated use cases in cognitive robotics research and social interaction studies, especially where a human operator can supervise movement while researchers observe whether the robot’s responses feel natural, timely, and understandable. For this kind of work, the important question is not whether Eva can replace a worker, but whether it can reliably support repeatable experiments with people.

Capabilities That Matter
Reported specifications suggest Eva is a medium-sized humanoid at about 165 x 40 x 30 cm and 25 kg, a form factor that supports close-proximity interaction without making the platform unwieldy. Its sensor set is described as including RGB cameras, an IMU, a gyroscope, and force sensors, while visual SLAM is listed as the navigation approach, all of which point to perception and balance rather than open-ended autonomy. The robot is also associated with force limiting, collision detection, and an emergency stop, which are the kinds of safety features that matter when a humanoid is meant to operate around people.
Rivals Edge Check
| Robot | Key Advantage | Where Eva Wins | Target Use |
|---|---|---|---|
| NAO | Widely used education and research platform with established developer familiarity | Eva is positioned around more human-like social interaction studies and expressive humanoid presence | Education and lab research |
| Abi | Research-oriented humanoid designed for human-facing interaction | Eva’s broader Hanson ecosystem gives it a stronger tie to expressive social robotics demos | Interaction studies and demonstrations |
| Zeno | Compact humanoid built for approachable social interaction | Eva’s humanoid research framing is better suited to balance and full-body motion studies | Social robotics and engagement |
| PM01 | Newer humanoid platform focused on general-purpose robot capability | Eva’s established research role is more relevant for controlled studies than broad deployment claims | General humanoid experimentation |



Teleoperation Leads
Eva also reflects a wider shift in humanoids toward teleoperation-first systems, where human guidance remains central and the robot’s job is to extend that intent through a physical body. That matters because the category’s hardest problems are still full-body coordination, balance, and manipulation in uncontrolled environments, all of which are easier to validate when a human operator is in the loop. The signal for the industry is clear: near-term progress is likely to come from better human control of humanoid bodies, not from fully autonomous claims.
One Robot
Infinite Possibilities
One Robot
Infinite Possibilities

TP-01 by Raydiculous
Related Articles
Hanson Robotics’ Professor Einstein shows how desktop humanoids are being packaged for education and interaction
Waseda’s AIREC pushes humanoid care robots toward teleoperation-first nursing tasks

Hanson Robotics’ Grace remains a landmark humanoid nursing robot as healthcare adoption stays uneven
Hanson Robotics’ Han remains a study in expressive humanoid teleoperation and social interaction
Related Comparisons
Compare Eva with similar robots


Sophia vs Aria - Robot Girlfriend
Head-to-head: Sophia vs Aria - Robot Girlfriend compared on bipedal balance, AI learning, and real-world deployment.


NEO Home Robot vs ELIXIS
NEO Home Robot or ELIXIS? See which humanoid robot performs better for manufacturing, logistics, and research.

Figure 03 vs VR-H3
Which humanoid robot is better? Figure 03 vs VR-H3 compared for dexterity, AI capabilities, and price.


Unitree G1 vs Unitree H2
In-depth comparison of Unitree G1 and Unitree H2, covering hardware capabilities, teleoperation, and enterprise readiness.
Learn More About This Robot
Discover detailed specifications, reviews, and comparisons for Eva.
View Robot Details →