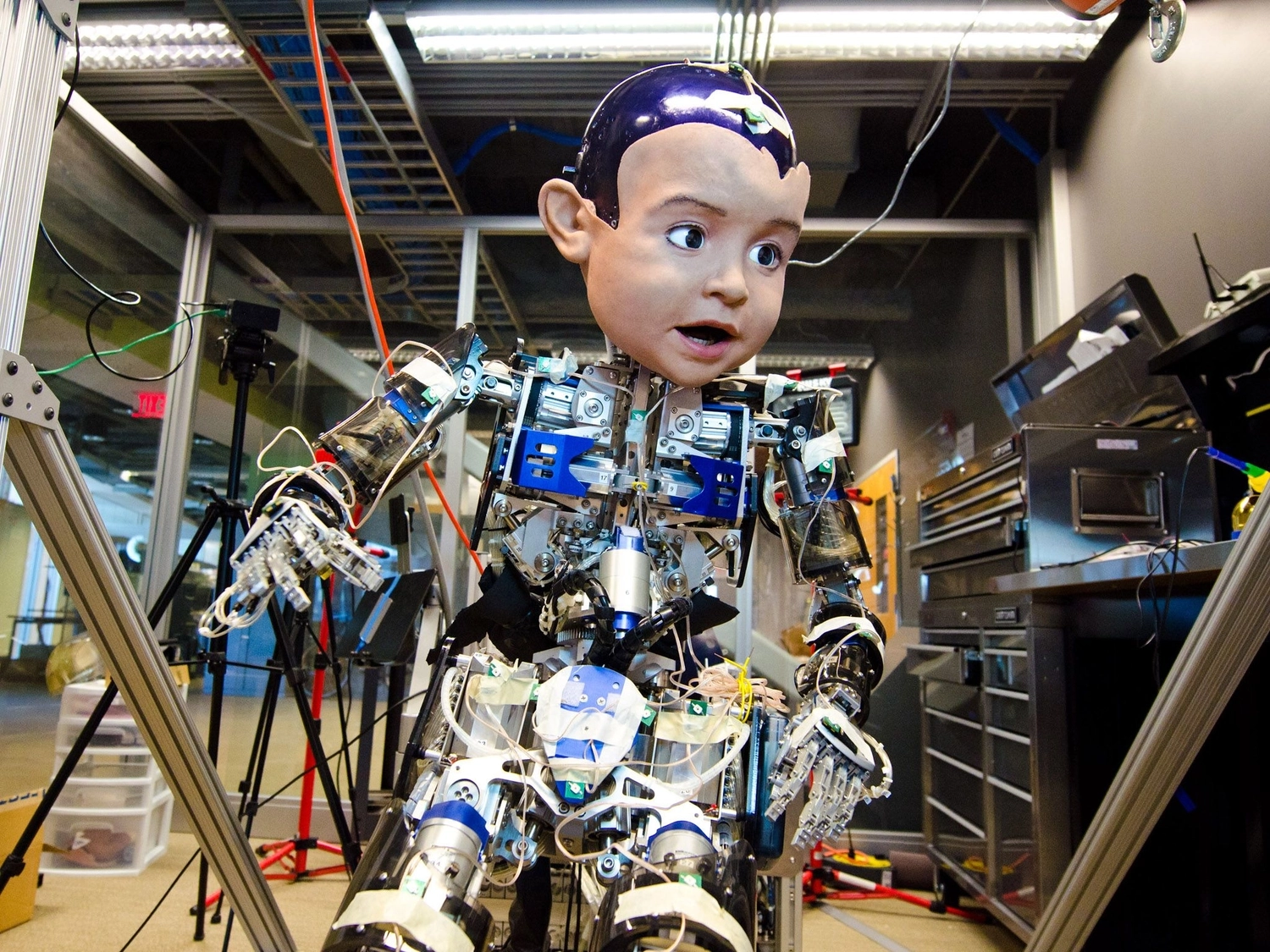
Hanson Robotics’ Diego-San remains a benchmark for toddler-like humanoid research
Robot Details
Diego-San • Hanson RoboticsPublished
May 25, 2026
Reading Time
3 min read
Author
Origin Of Bots Editorial Team
Research Bot Origins
Human-like robots are still trying to solve a practical problem: how to coordinate a body, read people, and respond in real time inside human environments. Hanson Robotics’ Diego-San, first activated in 2013, was built as a toddler-like research platform with a Hanson-created head and a Kokoro body, and it has been used at UC San Diego to study infant cognitive development, social robotics, and sensory-motor learning.
Why It Still Matters
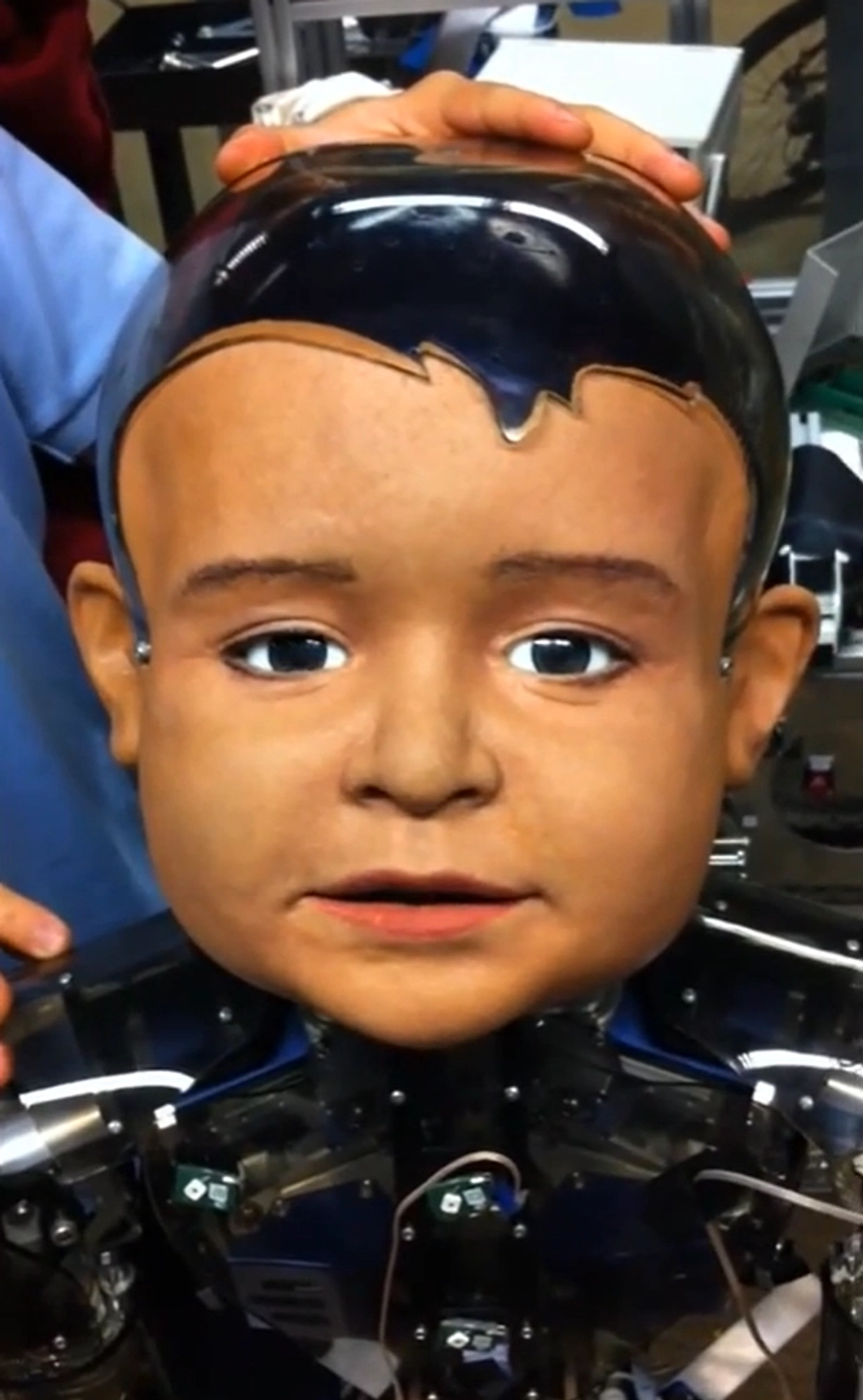
Diego-San matters because it was designed around the hardest part of humanoids, not the flashiest one: natural interaction that depends on face, balance, and timing working together. Its eye cameras, expressive face, and learning-oriented setup were intended to support research into how humans respond to robots that move and react more like children than machines. That focus still makes it relevant as the industry shifts toward teleoperation-first humanoids that need dependable coordination in close contact with people. Diego-San is less about appearance than about testing how humans trust motion that feels alive.
How It Works
The system flow is straightforward: human motion input and interaction cues are processed by proprietary AI on Linux, then translated into joint actuation, facial expression, and balance correction. In practical terms, the robot’s cameras, microphones, IMUs, pressure sensors, and potentiometers give it a constant stream of positional and contact data, while visual SLAM and compliance control help it stay oriented and avoid abrupt collisions. That architecture fits a humanoid designed for live interaction, where small motion errors can change how a person responds.
A Lab-Test Role
The most concrete deployment scenario for Diego-San is infant cognitive development research in a controlled lab setting, where scientists can study how people interpret gaze, posture, and facial feedback from a child-sized humanoid. In that environment, the robot’s value is not autonomous decision-making but repeatable interaction, letting researchers test sensory-motor learning and social response under consistent conditions. That makes it a research instrument as much as a robot, especially for studies that depend on precise, human-centric behavior.

Capability Snapshot
Diego-San is reported at 130 x 70 x 40 cm and 35 kg, a size that supports tabletop-to-child-scale social interaction rather than warehouse work. Its sensor suite includes two Point Grey Dragonfly2 RGB cameras, two microphones, two IMUs, 38 potentiometers, and 88 pressure sensors, which collectively enable visual tracking, audio sensing, balance feedback, and contact awareness. The platform is also described as using force limiting, collision detection through pressure sensors, and compliance control, which are all important for safe close-up interaction.
Rivals Edge Check
| Robot | Key Advantage | Where Diego-San Wins | Target Use |
|---|---|---|---|
| HRP-4 | Strong full-body humanoid locomotion research focus | More childlike social expression and developmental research framing | Human motion studies |
| Bina48 | Conversation-oriented social presence | More physical embodiment and sensory-motor interaction depth | Social robotics |
| Zeno | Smaller consumer-facing humanoid form factor | Greater research emphasis on infant cognition and expressive face control | Interaction research |
| NAO | Widely used educational and lab platform | Larger, more humanlike toddler-style presentation for developmental studies | Education and research |




Industry Direction
Diego-San also highlights a long-running industry lesson: humanoid progress is not only about walking better, but about making motion readable to people. As more companies focus on teleoperation and assisted interaction, robots like this one show why full-body coordination, facial cues, and safe physical compliance remain central to the category. The broader signal is that human-facing humanoids are increasingly judged by how well they fit into real social spaces, not just by how many joints they have.
One Robot
Infinite Possibilities
One Robot
Infinite Possibilities

TP-01 by Raydiculous
Sources
Related Articles
Tesla’s Optimus Gen 3 points to teleoperation-first humanoids as production nears

Albert HUBO showed how a humanoid can pair a lifelike head with bipedal motion in a research platform built for human interaction

Hanson Robotics’ Joey Chaos showed how expressive humanoids can hold a conversation, not just strike a pose

Hanson Robotics’ Jules Shows How Humanoid Robots Are Being Built for Human Interaction, Not Autonomy
Related Comparisons
Compare Diego-San with similar robots


Sophia vs Aria - Robot Girlfriend
Head-to-head: Sophia vs Aria - Robot Girlfriend compared on bipedal balance, AI learning, and real-world deployment.


NEO Home Robot vs ELIXIS
NEO Home Robot or ELIXIS? See which humanoid robot performs better for manufacturing, logistics, and research.

Figure 03 vs VR-H3
Which humanoid robot is better? Figure 03 vs VR-H3 compared for dexterity, AI capabilities, and price.


Unitree G1 vs Unitree H2
In-depth comparison of Unitree G1 and Unitree H2, covering hardware capabilities, teleoperation, and enterprise readiness.
Learn More About This Robot
Discover detailed specifications, reviews, and comparisons for Diego-San.
View Robot Details →