Kinetix AI’s KaiBot pushes humanoid robots toward tactile teleoperation
Robot Details
KaiBot • Kinetix AIPublished
June 11, 2026
Reading Time
3 min read
Author
Origin Of Bots Editorial Team

Full-body control arrives
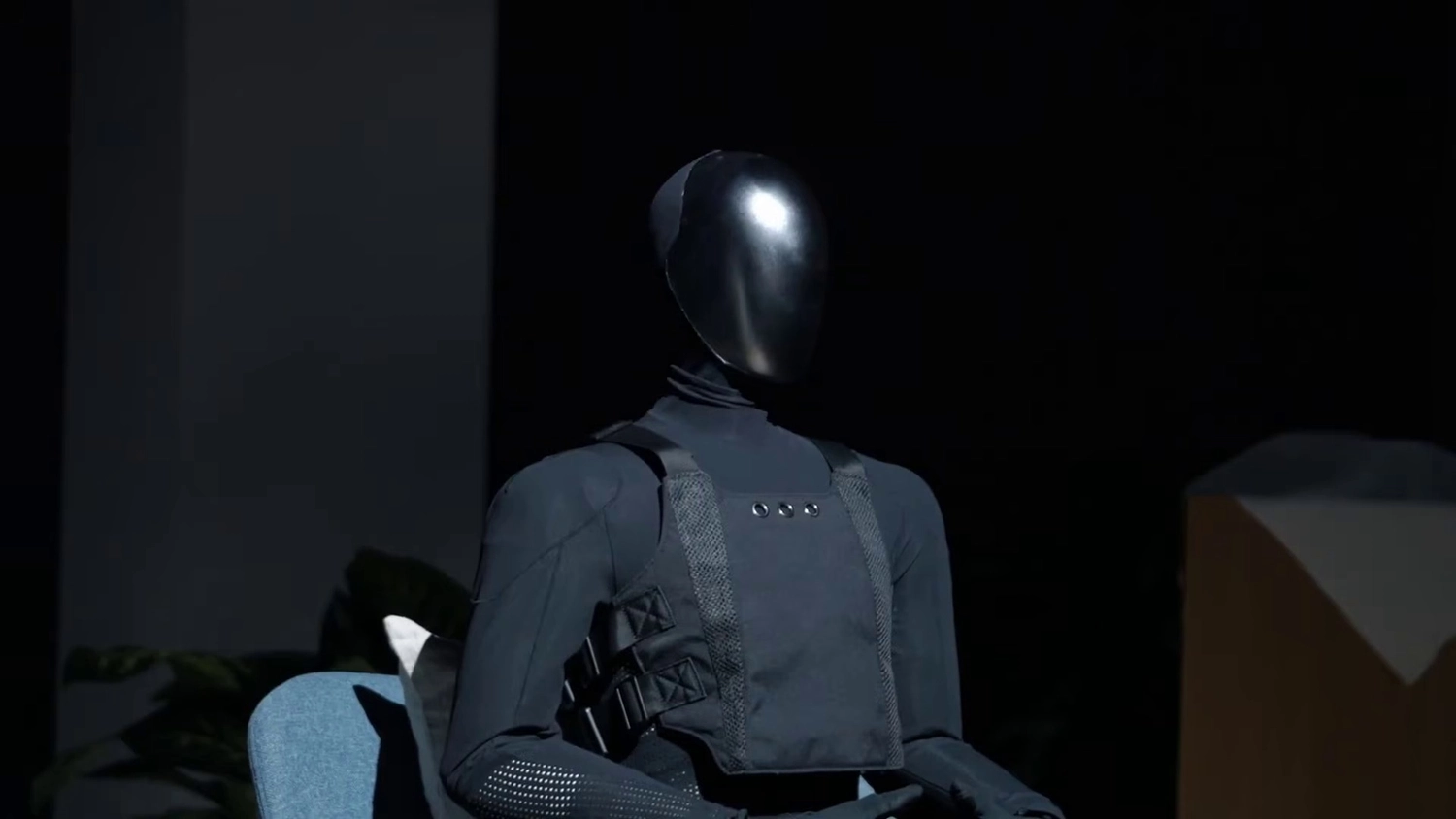
Kinetix AI has unveiled KaiBot, a full-size humanoid designed around real-time motion imitation, balance correction, and dexterous manipulation rather than pre-scripted movements. The robot was presented as a 173 cm, 70 kg platform with tactile skin, compliant hands, and an AI stack built to translate human motion into coordinated whole-body action.
Why it stands out
KaiBot matters because it concentrates on the hardest parts of humanoid robotics: stable bipedal control, natural physical interaction, and hand-level dexterity that can survive contact with people and objects. Its full-body tactile skin, compliant joints, and LLM-integrated software point to a teleoperation-first machine built for assisted service and human-centric workspaces, not just lab demos. Notably, that positioning aligns with a broader industry shift away from rigid motion libraries and toward operator-guided humanoids that can be controlled in real time. KaiBot’s story is less about size than about making whole-body imitation usable in the real world.

From motion to action
The system flow is straightforward: human motion input goes into the AI model, the model interprets the movement and context, and the robot drives joint actuation while continuously correcting balance. Kinetix AI says KaiBot’s KAI World Model uses a base-action-evaluation loop, which suggests the robot does not simply copy movement but checks whether an action is stable before it executes. In practical terms, that architecture is aimed at reducing the gap between what an operator does and what the robot can safely reproduce.
A lab-side worker
One realistic deployment scenario is human-robot collaboration in a lab where fragile instruments must be moved without sudden force spikes. KaiBot’s tactile skin and compliant hand joints would matter most here, because the robot needs to recognize contact early, adjust grip pressure, and avoid damaging delicate equipment during handoffs. In that setting, the value is not autonomy for its own sake, but reliable teleoperated handling in a space where people and machines share the same workflow.
Specs as capability
KaiBot is reported to stand 173 x 45 x 30, weigh 70 kg, and move at up to 5 km/h, which frames it as a full-size humanoid meant to work in close quarters rather than race across open ground. Its tactile sensing is described as 18,000 points with 0.1N sensitivity, a design choice that supports fine contact control during manipulation and person-to-person interaction. The robot is also described as carrying packages, precision instruments, and supporting people interaction, while its safety stack includes full-body tactile skin, force limiting, collision detection, and compliant joints with 14 passive DoF per hand.
Rivals Edge Check
| Robot | Key Advantage | Where KaiBot Wins | Target Use |
|---|---|---|---|
| Embodied Tien Kung 2.0 Plus | Likely broader mobility emphasis | KaiBot’s tactile skin and compliant hands favor closer human contact and finer manipulation | Human-centric service work |
| Titan 01 | Strong whole-body platform focus | KaiBot appears more centered on touch-aware interaction and teleoperation fidelity | Assisted service and labs |
| Bolt | Simpler humanoid positioning | KaiBot offers a more elaborate manipulation stack with full-body tactile feedback | Precision handling |
| CyberOne 2026 Version | Entertainment and interaction focus | KaiBot is framed around work tasks, balance correction, and operator-guided utility | Remote inspection and service |

Teleoperation first
KaiBot also signals that humanoid robotics may be moving toward supervised deployment before full autonomy becomes routine. If the core value is real-time imitation and force-aware manipulation, then the market will likely reward systems that are easier to teleoperate, safer around people, and more predictable under operator control. For the category as a whole, that means the next competitive race may be less about scripted demos and more about how well a humanoid can extend a human operator’s reach.
Related Articles
Futuring F1 points to the teleoperation-first future of humanoid robots

Honor’s D1 humanoid pushes teleoperation and speed to the front of the race
Sudo R1 pushes simulation-first humanoid robotics toward teleoperation-ready physical intelligence
PsiBot’s Psi V1 brings teleoperation-first humanoid control into a wheeled service form
Related Comparisons
Compare KaiBot with similar robots

GR-1 vs Unitree H1-2
Head-to-head: GR-1 vs Unitree H1-2 compared on bipedal balance, AI learning, and real-world deployment for research and care.


Titan 01 vs CyberOne 2026 Version
Which humanoid robot is better? Titan 01 vs CyberOne 2026 Version compared for dexterity, AI capabilities, and price.


NEO Home Robot vs ELIXIS
NEO Home Robot or ELIXIS? See which humanoid robot performs better for manufacturing, logistics, and research.


Sophia vs Aria - Robot Girlfriend
Head-to-head: Sophia vs Aria - Robot Girlfriend compared on bipedal balance, AI learning, and real-world deployment.
Learn More About This Robot
Discover detailed specifications, reviews, and comparisons for KaiBot.
View Robot Details →