PsiBot’s Psi V1 brings teleoperation-first humanoid control into a wheeled service form
Robot Details
Psi V1 • PsiBotPublished
June 11, 2026
Reading Time
3 min read
Author
Origin Of Bots Editorial Team
New service humanoid
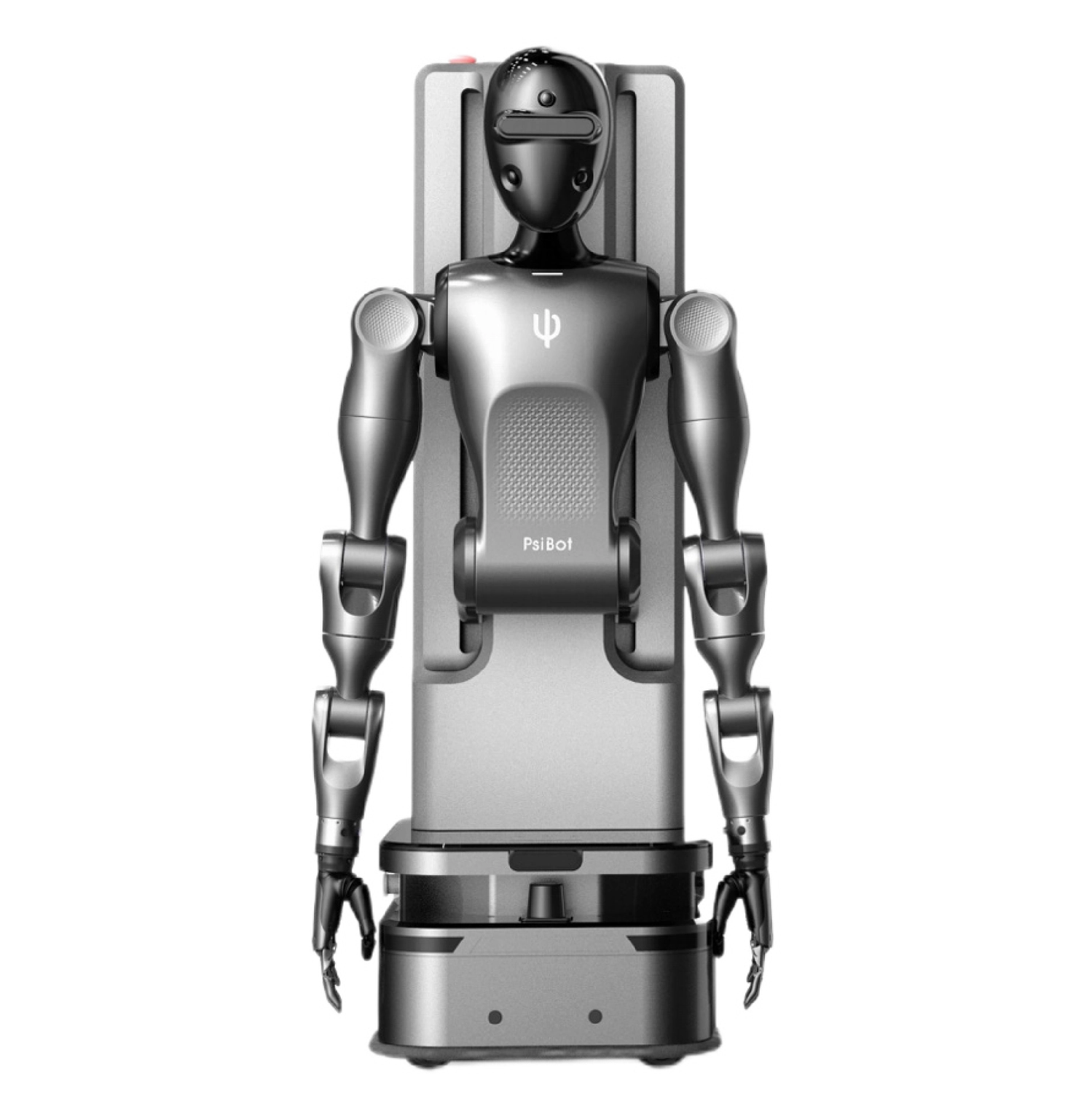
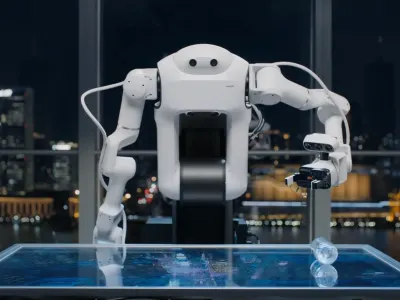
PsiBot’s Psi V1 is a humanoid robot built around manipulation, perception, and task execution, and the company has presented it as a wheeled platform for real-world work in human-centric spaces. Verified product listings describe a 175 cm-tall, 150 kg system aimed at industrial automation, light industrial tasks, delivery, sorting, and guided assistance.
Why it matters now
Psi V1 matters because it reflects a broader shift in humanoid robotics: the near-term value is moving from fully scripted motion toward teleoperation, assisted service, and remote work in structured environments. Its reported combination of full-size reach, multiple camera streams, force feedback at the arm end, and AI-driven task planning points to a robot optimized for coordinated handling rather than simple locomotion. The platform also appears positioned as a software-defined machine, with ROS2 compatibility, Python APIs, and reinforcement learning support shaping how operators and developers use it. Psi V1’s significance is less about walking and more about making humanoid manipulation practical in supervised settings.
How it works
In simple terms, the flow is Input → Processing → Output: human motion input and sensor data are fed into the robot’s AI stack, the software interprets the scene and task, and the system then drives actuation with balance correction and manipulation control. PsiBot’s reported architecture centers on hierarchical end-to-end AI, reinforcement learning, and ROS2-compatible APIs, which together suggest a pipeline built for continuous adjustment rather than one-off scripted moves. That matters for humanoid work because the same control loop has to manage grasping, orientation, and stability at the same time.
A warehouse test case
One realistic deployment scenario is warehouse sorting, where an operator or supervisor can guide Psi V1 through repetitive pick-and-place tasks while the robot handles reaching, grasping, and package movement. Its payload focus on tools, packages, and precision instruments matches that kind of environment, and the perception stack is designed to help it identify objects and work stations in cluttered spaces. In that setting, the robot’s value is not raw speed but the ability to keep handling tasks consistent while a human remains in the loop.

Specs that enable work
Psi V1 is reported to measure 175 x 70 x 60 cm and weigh 150 kg, a footprint that supports human-scale reach and a stable working posture. Its wheeled mobility, Visual SLAM navigation, and sensor suite of 3 RGB-D cameras, 5 fisheye cameras, a six-dimensional force sensor, an IMU, and a gyroscope are intended to help it move through indoor environments and maintain precise control during manipulation. Safety features listed for the platform include force limiting, collision detection, and an emergency stop, which are essential if the robot is expected to work near people.
Rivals Edge Check
| Robot | Key Advantage | Where Psi V1 Wins | Target Use |
|---|---|---|---|
| Tron 2 | Likely emphasizes generalized humanoid motion | Psi V1 is framed around teleoperation, perception, and supervised manipulation | Assisted service and remote task execution |
| Zerith H1 | Likely focuses on humanoid dexterity | Psi V1 adds wheeled mobility and software hooks for developer workflows | Human-centric indoor work |
| Mirokaï | Likely built around social interaction | Psi V1 appears more task-oriented for manipulation and logistics | Service and guided assistance |
| TIAGo Pro | Likely strong in mobile manipulation | Psi V1’s humanoid form factor and broader AI stack target more human-like interaction | Warehousing and structured industrial tasks |




Industry direction shifts
Psi V1 also signals that humanoid robotics is becoming more software-centric, with integration layers now mattering as much as the robot body itself. If this category continues in the direction PsiBot is pursuing, the winning platforms may be the ones that can be taught, monitored, and corrected in real time rather than the ones that merely imitate human motion. That is a significant change for commercial robotics because it favors deployment in controlled spaces where teleoperation and task continuity matter more than free-roaming autonomy.
Related Articles
Futuring Robot launches the F2, a humanoid aimed at home trials and everyday assistance
Futuring F1 points to the teleoperation-first future of humanoid robots

Honor’s D1 humanoid pushes teleoperation and speed to the front of the race
Sudo R1 pushes simulation-first humanoid robotics toward teleoperation-ready physical intelligence
Related Comparisons
Compare Psi V1 with similar robots

GR-1 vs Unitree H1-2
Head-to-head: GR-1 vs Unitree H1-2 compared on bipedal balance, AI learning, and real-world deployment for research and care.


Titan 01 vs CyberOne 2026 Version
Which humanoid robot is better? Titan 01 vs CyberOne 2026 Version compared for dexterity, AI capabilities, and price.


NEO Home Robot vs ELIXIS
NEO Home Robot or ELIXIS? See which humanoid robot performs better for manufacturing, logistics, and research.


Sophia vs Aria - Robot Girlfriend
Head-to-head: Sophia vs Aria - Robot Girlfriend compared on bipedal balance, AI learning, and real-world deployment.
Learn More About This Robot
Discover detailed specifications, reviews, and comparisons for Psi V1.
View Robot Details →