PNDbotics pushes Adam-U as a stationary humanoid built for manipulation data, teleoperation training
Robot Details
Adam-U • PNDboticsPublished
June 11, 2026
Reading Time
3 min read
Author
Origin Of Bots Editorial Team

Data Over Walking
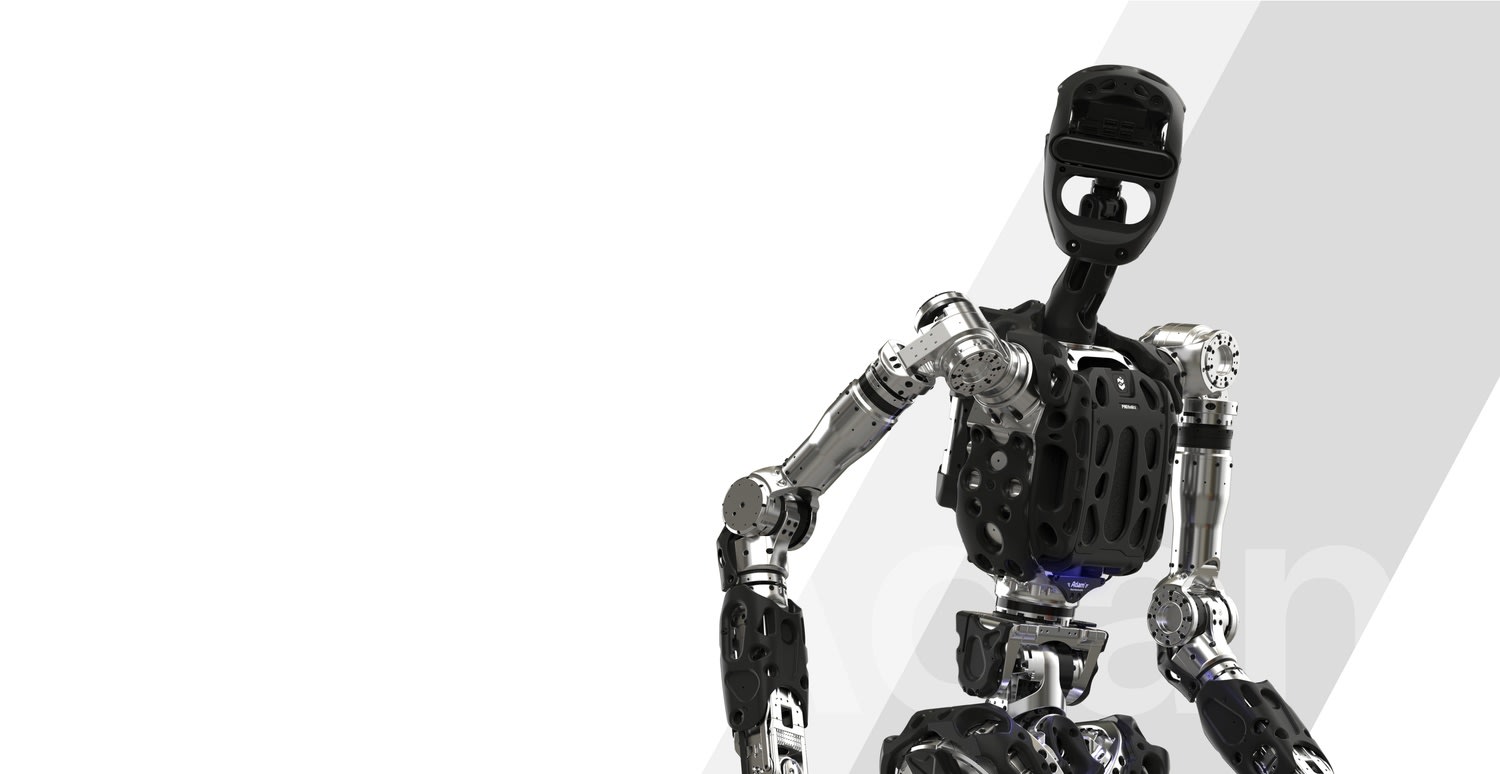
Humanoid robots are increasingly being judged less by how far they can walk and more by how well they can mirror human motion, hold tools, and generate useful training data. PNDbotics has been showcasing Adam-U as a stationary humanoid research platform for data acquisition and operation training, highlighting its 31 degrees of freedom, dexterous hands, and motion-capture-oriented setup at recent CES appearances.
Why It Stands Out
Adam-U’s pitch is narrower than a general-purpose humanoid’s, and that is the point. By focusing on full-body motion imitation, balance correction through a waist brake system, and hand-level tactile sensing, the platform is aimed at researchers who need repeatable manipulation rather than open-ended autonomy. Its ROS-based software stack, C++ and Python APIs, and Isaac Gym compatibility also matter because they lower the friction between simulation, teleoperation, and machine learning workflows. Adam-U is designed less as a walking robot and more as a data engine for humanoid control.

Input To Output
For Adam-U, the system flow is straightforward: human motion input goes into AI model processing, which then drives joint actuation and balance correction. In practice, that means the robot is meant to capture what a person does, translate it into coordinated movement, and use onboard sensing to keep the torso and arms stable while manipulating objects. PNDbotics has also tied the platform to Sim2Real workflows, suggesting a loop where actions are learned in simulation and then transferred to the physical robot.
Lab-Grade Manipulation
The most concrete use case is robotics research inside labs and R&D centers, where Adam-U can be used for dexterous manipulation tasks such as tool handling, object sorting, and operation training. That setting fits the platform’s stationary design: a fixed base reduces locomotion complexity and lets teams concentrate on manipulation quality, teleoperation fidelity, and data collection for imitation or reinforcement learning. The result is a robot optimized for controlled human-centric spaces rather than open environments.
Reported Build Profile
Reported specifications put Adam-U at an adjustable height of 135 to 177 cm, with a 60 cm width and 40 cm depth, making it compact enough for lab workstations while still resembling a human upper-body workspace. Its 61 kg weight and stationary platform format support stability during arm and hand work, while the listed sensor package includes binocular vision, IMUs, tactile hand sensing, force sensors in the actuators, and motion-capture integration. PNDbotics also says the system is built around a ROS-based OS with C++ and Python access, and the company’s CES material points to an emphasis on simulation and real-world transfer rather than locomotion.
Rivals Edge Check
| Robot | Key Advantage | Where Adam-U Wins | Target Use |
|---|---|---|---|
| Elf V1 Series | Likely broader humanoid motion platform with walking-focused presence | Adam-U is more focused on manipulation data, teleoperation training, and stationary stability | General humanoid research |
| Figure 03 | Likely stronger autonomy narrative and general-purpose task ambition | Adam-U offers a research-first, upper-body setup built for controlled data acquisition | Industrial task automation |
| Elf-Xuan 2.0 | Likely emphasis on embodied interaction and humanoid expression | Adam-U is better aligned with repeatable lab manipulation and motion-capture workflows | Human-robot interaction research |
| Green | Likely compact humanoid form factor for demonstration settings | Adam-U has a clearer manipulation training stack and API-driven research integration | Demo and assistant scenarios |



Industry Signal
Adam-U reflects a broader shift in humanoids from pre-programmed motion libraries toward systems that learn from human demonstration and simulation. That matters because it reframes success: the near-term value of a humanoid may come from how efficiently it can collect, replay, and refine behavior, not from whether it can handle every task on its own. For buyers in research and industrial training, that is a more measurable product category than a humanoid that promises general intelligence before the software is ready.
Related Articles
Raydiculous’s TP-01 pushes humanoids toward teleoperation-first service roles

Zoomlion’s Z01 humanoid lands at KOMATEK with a Tai Chi demo and an industrial pitch

Techman Robot’s TM Xplore I debuts as a wheeled humanoid aimed at factory work and teleoperation

Leju Robotics positions KUAVO 5 as a teleoperation-first humanoid for factories and service spaces
Related Comparisons
Compare Adam-U with similar robots

GR-1 vs Unitree H1-2
Head-to-head: GR-1 vs Unitree H1-2 compared on bipedal balance, AI learning, and real-world deployment for research and care.


Titan 01 vs CyberOne 2026 Version
Which humanoid robot is better? Titan 01 vs CyberOne 2026 Version compared for dexterity, AI capabilities, and price.


NEO Home Robot vs ELIXIS
NEO Home Robot or ELIXIS? See which humanoid robot performs better for manufacturing, logistics, and research.


Sophia vs Aria - Robot Girlfriend
Head-to-head: Sophia vs Aria - Robot Girlfriend compared on bipedal balance, AI learning, and real-world deployment.
Learn More About This Robot
Discover detailed specifications, reviews, and comparisons for Adam-U.
View Robot Details →