Toyota’s CUE7 shows how humanoid robots are moving from scripted motion to learning-based control
Robot Details
CUE7 • ToyotaPublished
June 8, 2026
Reading Time
3 min read
Author
Origin Of Bots Editorial Team

A new basketball test
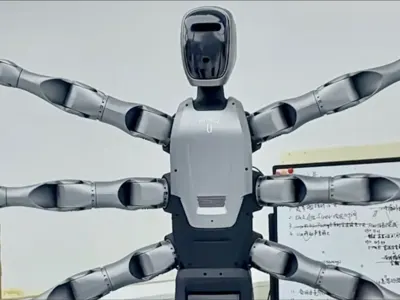
Toyota’s CUE7 is a humanoid robot built by Toyota that was demonstrated shooting, dribbling, and standing with smoother motion than earlier versions during a basketball showcase. The robot matters because Toyota is using the platform to test how real-time perception, balance, and manipulation can work together in a humanoid form.
Why this matters
CUE7 stands out because it is not being presented as a general-purpose household machine, but as a research humanoid tuned for coordinated movement, teleoperation-style control, and embodied AI testing. Its value is in the combination of full-body coordination, vision-based targeting, and adaptive motion control, all of which are harder to demonstrate reliably in a moving human environment than in a fixed lab setup. Notably, the demo frames humanoids less as pre-programmed performers and more as systems that learn and correct themselves in motion. CUE7’s real significance is that Toyota is treating humanoid control as a learning problem, not a choreography problem.

How it works
The control flow is straightforward: human motion data and task goals feed the AI model, the system processes distance, angle, and balance in real time, and the robot converts that into joint actuation plus stabilization corrections. Toyota’s reported stack combines reinforcement learning with model predictive control, while stereo cameras, LiDAR, and inertial and force sensing help the robot adjust before and during each movement. In practice, that means the robot is not just repeating a fixed shot routine; it is continuously updating posture, trajectory, and release timing as conditions change.
A service proxy
The most realistic deployment lens for CUE7 is assisted service in human-centric spaces, where a humanoid must move predictably, respond to visual cues, and handle objects at human height. The basketball demo is a proxy for that kind of work because it stresses balance, object handling, and rapid correction without needing a full industrial environment. Toyota has also positioned the CUE series as a research base for broader humanoid applications, which makes the public shot less about sport than about validation of motion control in complex spaces.

What the specs enable
CUE7 is reported at 218 cm tall, 74 kg, and around 1.2 m/s walking speed, a combination that points to a lightweight humanoid built for reach, stability, and controlled movement rather than brute force. Its sensor suite, including a stereo camera, torso-mounted LiDAR, IMU, gyroscope, and force sensors, is designed to support perception, balance, and fine motion control. The robot also appears to use a wheeled-leg mobility design and a proprietary AI stack with reinforcement learning and model predictive control integration, which supports its role as a research platform for manipulation and locomotion studies.
Rivals Edge Check
| Robot | Key Advantage | Where CUE7 Wins | Target Use |
|---|---|---|---|
| Miro U | Compact humanoid form for research and interaction | Better full-body reach and task-specific motion validation | Research demonstrations |
| David | Flexible humanoid platform for controlled environments | Stronger perception-driven movement and balance correction | AI and motion testing |
| Aria - Robot Girlfriend | Social interaction focus and expressive behavior | More credible physical manipulation and locomotion research | Human-robot interaction |
| Borg 01 | Research-oriented humanoid design | More public proof of coordinated athletic motion | Motion planning validation |


Industry signal
CUE7 points to an industry shift toward teleoperation-first humanoids that can be supervised, corrected, and gradually generalized rather than fully autonomous robots that must solve everything at once. That approach fits the current reality of humanoid deployment, where balance, manipulation, and safety still limit scale outside controlled environments. For the market, the signal is clear: the next phase of humanoids is likely to be defined by controlled usefulness, not humanlike independence.
Related Articles

Muks Robotics’ Spaceo Pro pushes humanoid robots toward teleoperation-first industrial work
Muks Robotics’ Spaceo M1 Pushes a Teleoperation-First Humanoid Into Service Roles
ROBOTIS introduces AI Sapiens K0 as an open humanoid platform for Physical AI

ROBOTIS puts AI Worker forward as a teleoperation-first humanoid for industrial tasks
Related Comparisons
Compare CUE7 with similar robots

GR-1 vs Unitree H1-2
Head-to-head: GR-1 vs Unitree H1-2 compared on bipedal balance, AI learning, and real-world deployment for research and care.


Titan 01 vs CyberOne 2026 Version
Which humanoid robot is better? Titan 01 vs CyberOne 2026 Version compared for dexterity, AI capabilities, and price.


NEO Home Robot vs ELIXIS
NEO Home Robot or ELIXIS? See which humanoid robot performs better for manufacturing, logistics, and research.


Sophia vs Aria - Robot Girlfriend
Head-to-head: Sophia vs Aria - Robot Girlfriend compared on bipedal balance, AI learning, and real-world deployment.
Learn More About This Robot
Discover detailed specifications, reviews, and comparisons for CUE7.
View Robot Details →