VinDynamics unveils Dyno humanoid robot at ICRA 2026 and Computex Taipei 2026
Robot Details
Dyno • VinRoboticsPublished
June 11, 2026
Reading Time
3 min read
Author
Origin Of Bots Editorial Team
A humanoid debut
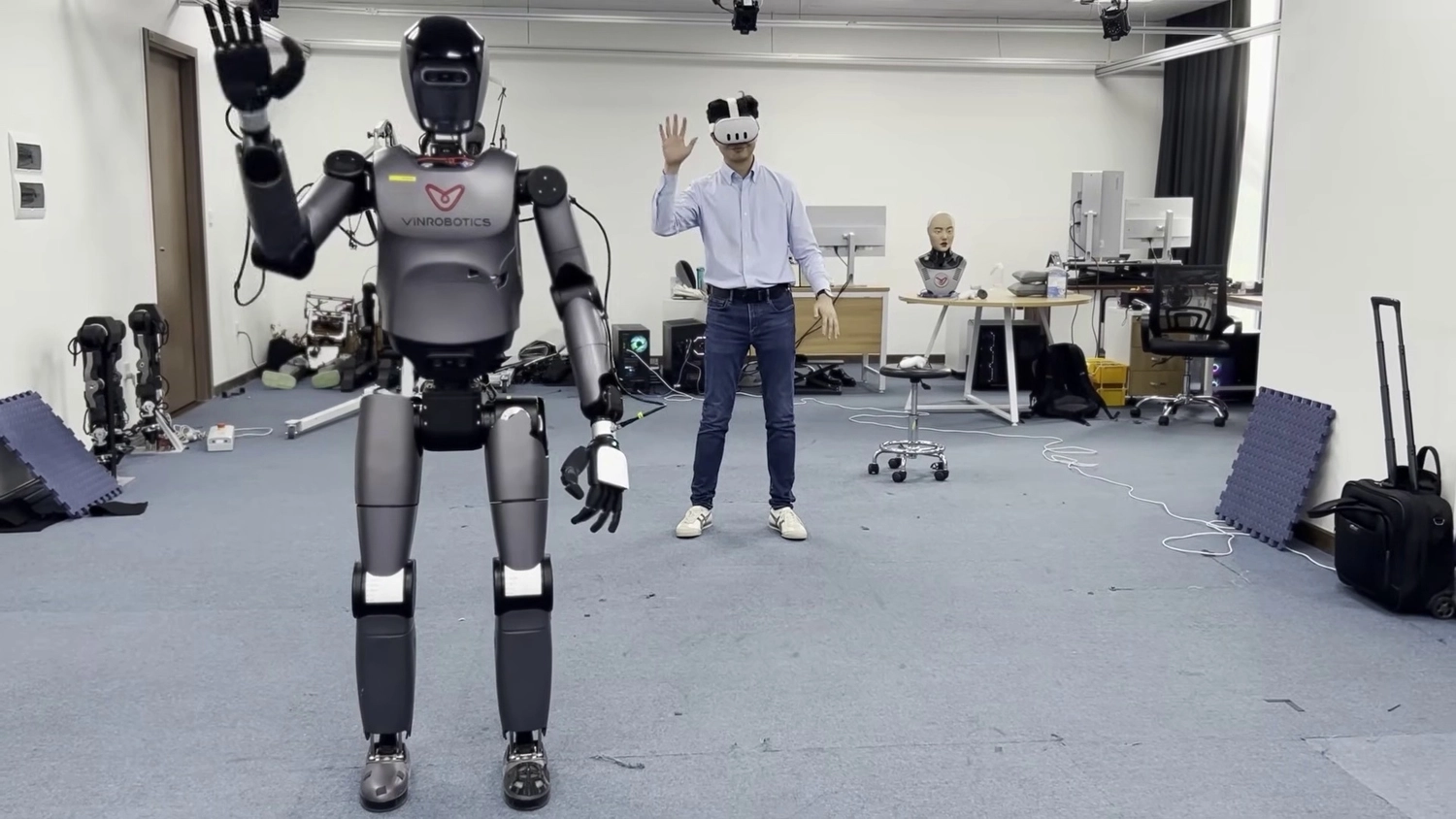
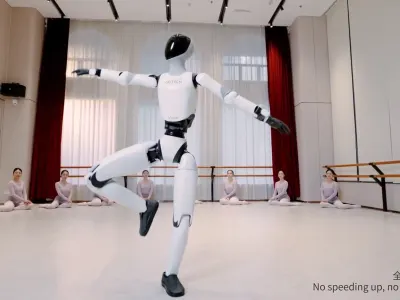
VinDynamics has unveiled Dyno, its first humanoid robot, at ICRA 2026 in Vienna and Computex Taipei 2026, putting a Vietnamese robotics platform in front of two of the year’s most visible technology audiences. The debut matters because humanoids are increasingly being judged not by lab demos alone, but by whether they can move, perceive, and interact in human spaces.
Why Dyno stands out
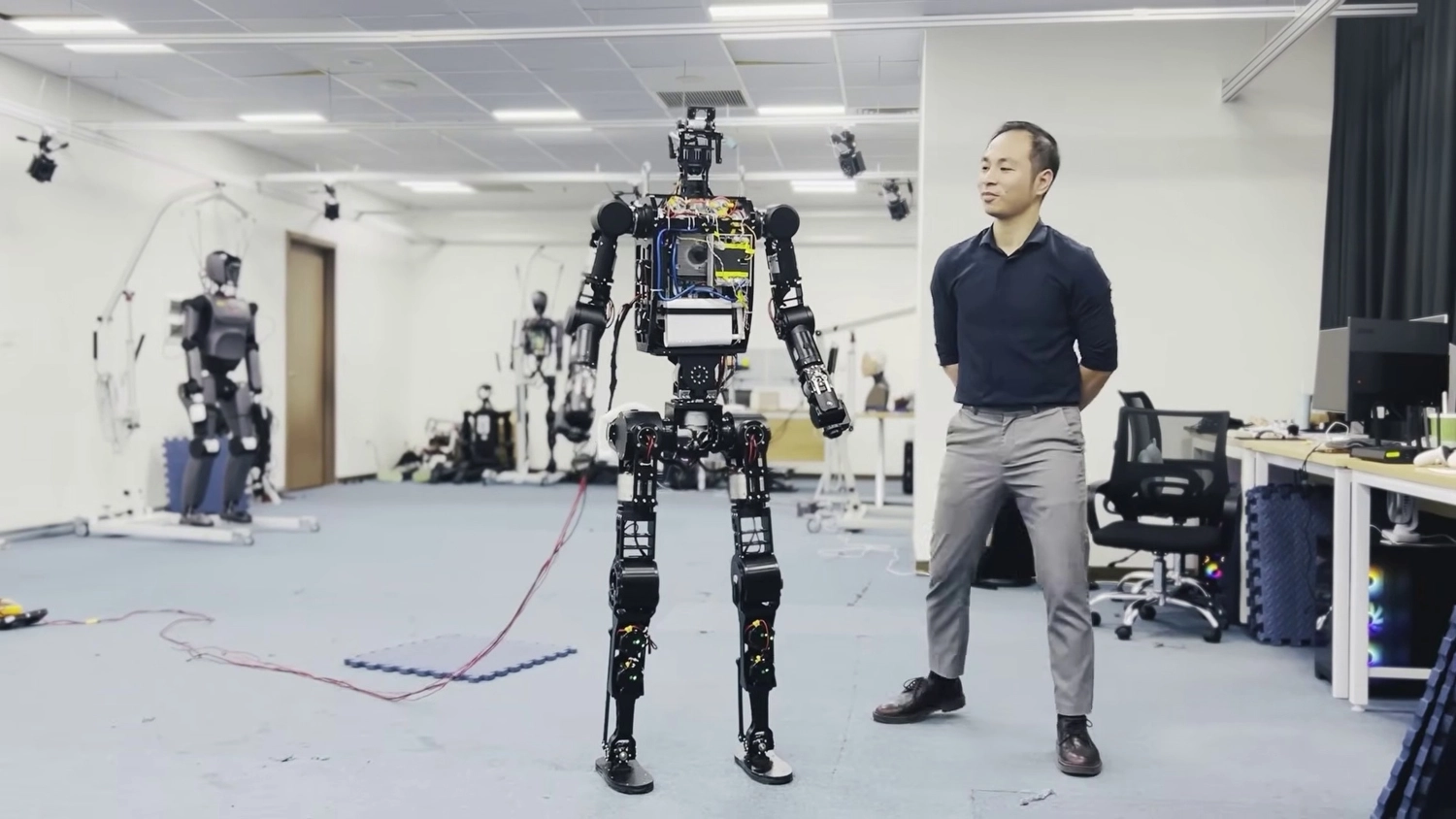
Dyno is being positioned around the core humanoid problem set: full-body coordination, balance, and manipulation in environments built for people. The company’s presentation emphasizes environmental awareness, human interaction, and service-oriented behavior, which are the qualities that matter most if a humanoid is meant to guide visitors, assist in security work, or handle light tasks without feeling mechanical. The broader significance is that Dyno is entering a category where natural interaction and teleoperation-style usefulness are becoming more important than pre-scripted motion alone. Dyno’s real test is not appearance, but whether its coordination and interaction hold up in human spaces.
How it works
Dyno’s reported system flow follows a familiar humanoid path: human motion input, AI model processing, and then joint actuation with balance correction. In practical terms, the robot’s sensing stack feeds the control system with environmental and body-state data, the AI layer interprets what to do next, and the robot then moves its joints while continuously correcting posture and stability. That architecture is built for teleoperation and assisted service use, where responsiveness and real-time correction matter more than raw autonomy.
Security in motion
The clearest near-term deployment scenario is security patrol in a campus or mixed-use complex, where Dyno can move through shared indoor spaces and respond to people rather than work behind barriers. In that setting, a humanoid with environmental awareness and interaction-oriented behavior can guide visitors, observe changes in a scene, and support routine patrols without requiring the space to be redesigned around the robot. That makes the platform more relevant to human-centric sites than to isolated industrial cells.

Specs that matter
Dyno is reported to stand 178 cm tall and weigh 75 kg, dimensions that place it in a human-scale form factor suited to indoor circulation and direct interaction. Its mobility is legged and bipedal, which supports step-by-step movement in spaces designed for people, while its sensing package is described as including RGB cameras, stereo or depth vision, an IMU, a gyroscope, force and torque sensing, joint encoders, and a microphone array. VinRobotics and related coverage also point to autonomous navigation with visual SLAM and environmental awareness, plus a proprietary AI-driven control stack that is reportedly being developed with development-friendly robotics software integration.
Rivals Edge Check
| Robot | Key Advantage | Where Dyno Wins | Target Use |
|---|---|---|---|
| GENE.01 | Tuned for general-purpose humanoid research and motion versatility | Dyno is framed more explicitly around human-facing service and guidance | Teleoperation and visitor interaction |
| Next‑Gen IRON | Strong focus on industrial motion and structured task execution | Dyno is better aligned to mixed public environments and interaction | Assisted service and security patrol |
| Matrix 3 | Emphasis on controlled locomotion and platform maturity | Dyno’s positioning is more about social presence and environmental awareness | Campus and facility services |
| Bolt | Compact operational footprint for targeted deployments | Dyno brings a larger human-scale profile for direct engagement | Human-centric inspection and guidance |



Industry direction
Dyno’s debut also reflects a wider shift in humanoids toward teleoperation-first deployment models, especially in places where full autonomy is still too fragile to trust at scale. That matters because the market is moving from “Can a humanoid walk?” to “Can it be supervised, guided, and used safely by non-robotics operators in daily environments?” For vendors, the competitive question is increasingly whether the robot can become a service layer for human work rather than a self-contained substitute.
Related Articles
PsiBot’s Psi V1 brings teleoperation-first humanoid control into a wheeled service form

Kinetix AI’s KaiBot pushes humanoid robots toward tactile teleoperation
UBTECH’s Walker C1 steps into the public eye as a service humanoid built for human-facing spaces

Lumos Robotics opens NIX to developers as compact humanoid demos expand beyond performance
Related Comparisons
Compare Dyno with similar robots

Figure 03 vs VR-H3
Which humanoid robot is better? Figure 03 vs VR-H3 compared for dexterity, AI capabilities, and price.

AgiBot A2 Ultra vs VR-H3
Which humanoid robot is better? AgiBot A2 Ultra vs VR-H3 compared for dexterity, AI autonomy, payload capacity, and industrial deployment readiness.

L7 vs VR-H3
Compare L7 by Robot Era vs VR-H3 by VinRobotics for humanoid mobility, dexterity, autonomy, and payload capacity in industrial applications.

VR-H3 vs Phantom MK1
Head-to-head: VR-H3 vs Phantom MK1 compared on bipedal balance, AI learning, payload strength, and real-world deployment for enterprise robotics.
Learn More About This Robot
Discover detailed specifications, reviews, and comparisons for Dyno.
View Robot Details →