PAL Robotics Kangaroo Redefines Legged Robot Research with Advanced Dynamic Control
Robot Details
Kangaroo • PAL RoboticsPublished
January 28, 2026
Reading Time
2 min read
Author
Origin Of Bots Editorial Team

Bipedal Platform Advances Locomotion Science
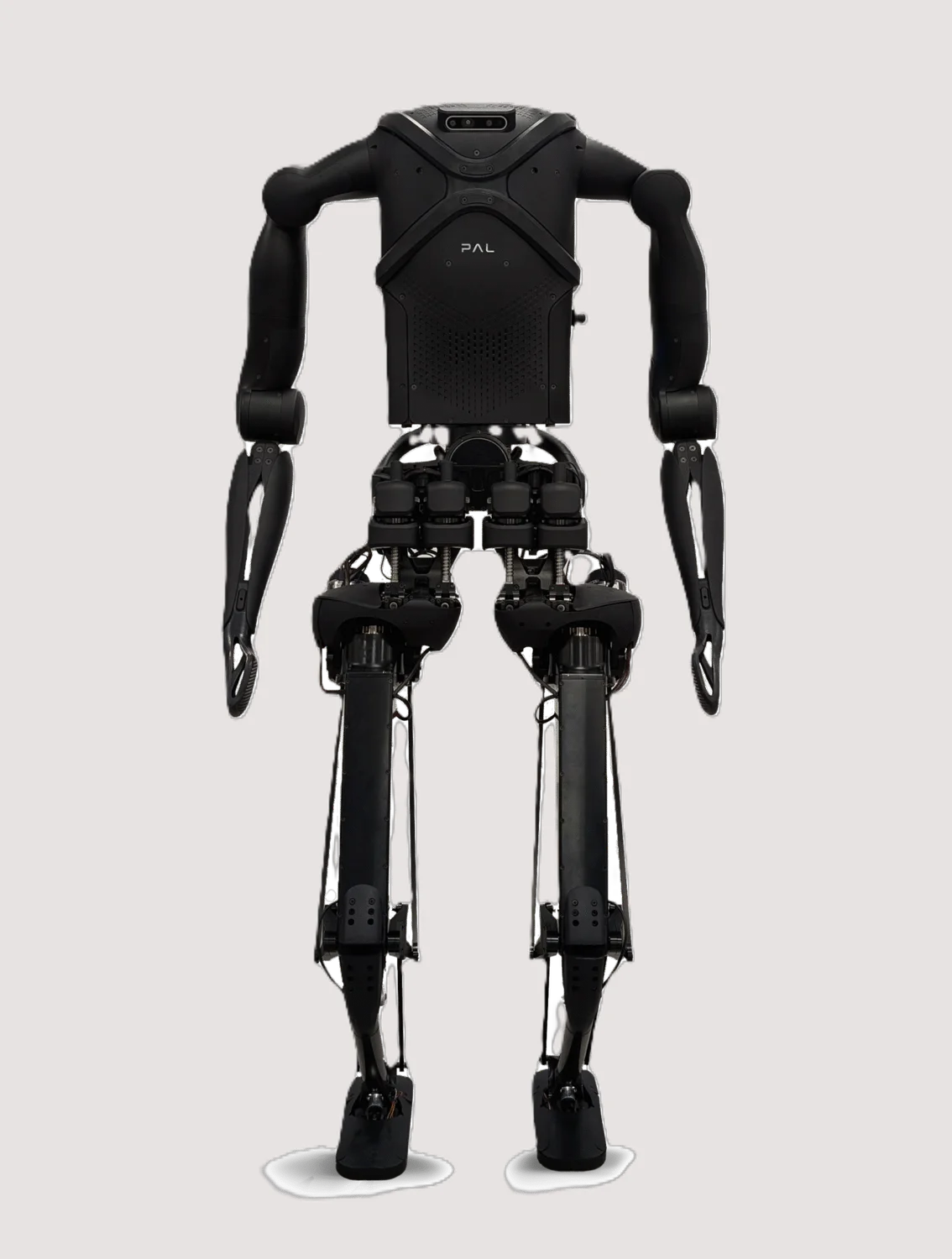
PAL Robotics has established Kangaroo as a cutting-edge research platform for exploring advanced control methods in dynamic legged locomotion. The lightweight bipedal humanoid combines custom linear actuators with closed kinematic chains, enabling researchers to investigate highly agile motions including jumping, running, and complex terrain navigation. Unlike traditional robotic platforms, Kangaroo's design prioritizes biomechanical efficiency and real-time force feedback, positioning it as a critical tool for next-generation legged robot development.
Engineering Innovation Meets Practical Design
Kangaroo distinguishes itself through its novel leg architecture featuring six degrees of freedom per leg and up to seven per arm, complemented by a human-like torso for natural movement patterns. The robot's anthropomorphic structure reduces moving inertia while maximizing agility, allowing researchers to test acrobatic motions and impact-resilient behaviors previously difficult to study. Its symmetric workspace supports both front and rear manipulation tasks, making it exceptionally versatile for complex experimental scenarios.
Sensor Integration Drives Precision Control
The platform incorporates a sophisticated sensory ecosystem including four RGB-D cameras for environmental perception, force sensors integrated into each leg actuator, torque sensors throughout the arm structure, and dual wrist force-torque sensors for manipulation feedback. This multi-modal sensing architecture enables researchers to implement reinforcement learning algorithms and trajectory optimization experiments with unprecedented precision. The 2 kHz control loop frequency ensures real-time responsiveness critical for dynamic motion research.
From Lab Insights to Real Applications
Kangaroo's research capabilities directly translate to practical advancement in autonomous systems. Scientists leverage the platform to develop control algorithms for disaster response robots, enhance human-robot collaboration in manufacturing environments, and explore bipedal locomotion for challenging terrain navigation. The robot's ROS2 integration and compatibility with Isaac Lab and Gazebo simulators accelerate the transition from computational models to physical implementation.

Skill Architecture Enables Interactive Research
Three configuration variants (Lite, Standard, Plus) scale the platform's interactive capabilities. The Lite version provides foundational bipedal mobility with fixed torso and 4 degrees of freedom per arm, supporting basic locomotion studies. Standard and Plus configurations unlock advanced dexterity through 7-degree-of-freedom arms and integrated perception kits, enabling manipulation-focused research. Battery autonomy reaching four hours supports extended experimental sessions, while the 40 kg weight and 160 cm height enable human-scale interaction studies. Force-limiting actuators and collision detection systems prioritize researcher safety during dynamic testing.
Versus Rivals Breakdown
| Robot | Strengths over Kangaroo | Kangaroo Advantages | Weaknesses vs. Kangaroo |
|---|---|---|---|
| Atlas | Higher payload capacity (25+ kg); proven outdoor terrain navigation | Superior leg DoF efficiency; lower weight; specialized for research agility | Significantly heavier; less accessible for academic research; proprietary control |
| Unitree H1 | Faster maximum speed (3.5+ m/s in some variants); lower cost | Better force feedback integration; dedicated sensor architecture; 2 kHz control loop | Limited arm manipulation; fewer research-grade sensors; less biomechanics focus |
| Talos | Humanoid upper body for manipulation; heavier payload | Specialized leg design for dynamic motion; optimized for jumping/running; lightweight design | Valkyrie requires more infrastructure; less agile in bipedal transitions |
| Digit | Excellent for logistics tasks; wheeled base hybrid option | Pure bipedal design; superior closed-kinematic chains; integrated force sensors throughout | Digit optimized for package delivery, not research; less flexible actuation |






Related Articles

Disney Imagineering Evolves Stuntronics for Spider-Man Aerial Flips
TALOS Powers Canada's First Humanoid Research Breakthrough
Kawasaki Kaleido 8.0 Redefines Collaborative Robotics with Force-Sensing Precision

PAL Robotics Unveils ARI Upgrades at CES 2026
Related Comparisons
Compare Kangaroo with similar robots


Mirokaï vs TIAGo Pro
Mirokaï or TIAGo Pro? Compare specs, navigation, battery, and sensors.

GR-1 vs Unitree H1-2
Head-to-head: GR-1 vs Unitree H1-2 compared on bipedal balance, AI learning, and real-world deployment for research and care.


Titan 01 vs CyberOne 2026 Version
Which humanoid robot is better? Titan 01 vs CyberOne 2026 Version compared for dexterity, AI capabilities, and price.


NEO Home Robot vs ELIXIS
NEO Home Robot or ELIXIS? See which humanoid robot performs better for manufacturing, logistics, and research.
Learn More About This Robot
Discover detailed specifications, reviews, and comparisons for Kangaroo.
View Robot Details →