CLARI (Compliant Legged Articulated Robotic Insect)
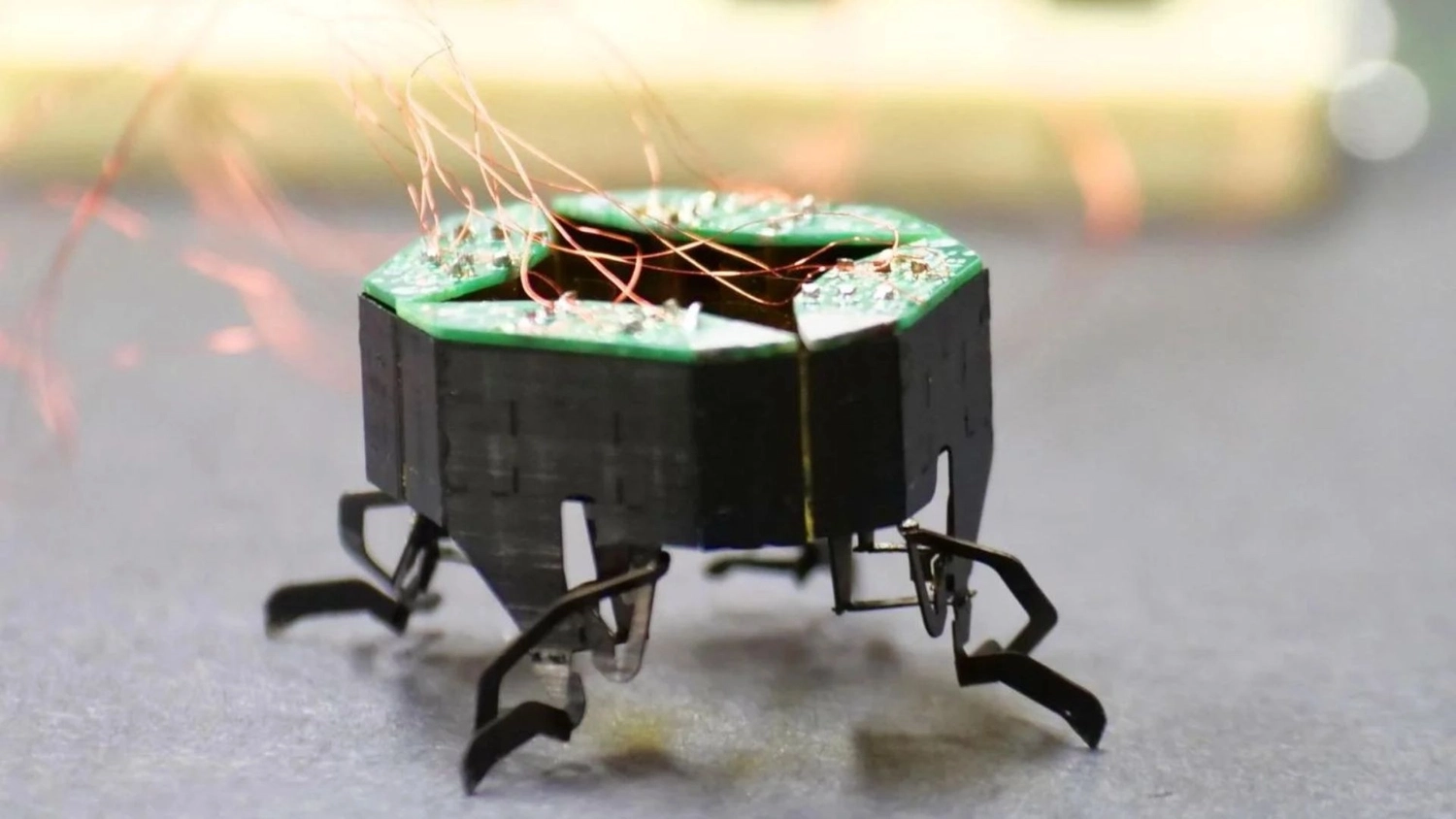
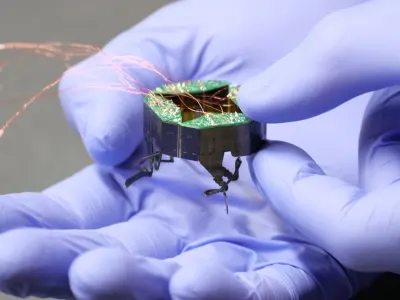
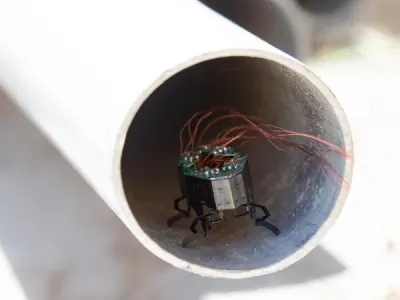
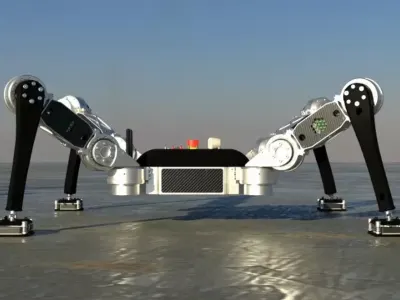
CLARI (Compliant Legged Articulated Robotic Insect) is an insect-scale quadrupedal robot designed for navigating cluttered and confined environments through passive shape-morphing enabled by origami-inspired compliant exoskeleton. It deforms its body width from 34mm to 21mm to squeeze through narrow gaps, supports multiple gaits (trot, walk) at 1-10 Hz stride frequencies, and demonstrates locomotion in open terrain and laterally constrained spaces. Key features include modular leg design for potential expansion to eight legs, robust mobility over uneven surfaces, and future plans for sensor integration and untethered operation. Use cases encompass search-and-rescue in disaster areas, high-value asset inspection (e.g., engine interiors), environmental monitoring, and exploration of natural terrains mimicking insect adaptability
Robot Specifications
Image Gallery
Below images are from University of Colorado Boulder's official sources


Review Videos
Watch expert reviews and demonstrations of this robot


Latest News About CLARI (Compliant Legged Articulated Robotic Insect)
Stay updated with the latest articles and developments

CU Boulder's CLARI Secures $2M Grants for Shapeshifting Upgrades (April 2025)
University of Colorado Boulder researchers secured $2 million in grants in April 2025 to advance their CLARI robot's shapeshifting prowess. The funding splits into a $650,000 award from the U.S. National Science Foundation and $1.4 million from the Air Force Research Laboratory, targeting enhancements for the Compliant Legged Articulated Robotic Insect. Led by Assistant Professor Kaushik Jayaram, the team aims to refine this insect-scale machine for extreme environments, building on prior demos where CLARI demonstrated passive body morphing to navigate tight gaps. This investment accelerates development of untethered versions, promising breakthroughs in confined-space operations.
More Robots
Discover more robots in the same category

Robots From Other Categories
Discover complementary robots from different categories that work well together



Frequently Asked Questions
Get answers to common questions about this robot
Q1. What is CLARI, and what problem is it designed to solve?
CLARI is a Compliant Legged Articulated Robotic Insect, an insect-scale quadrupedal robot developed by University of Colorado Boulder engineers. It addresses navigation in confined and cluttered environments by enabling passive body deformation to pass through narrow gaps.
Q2. What are the main capabilities and key features of CLARI?
CLARI features a modular design with four independently actuated legs driven by piezoelectric actuators. It demonstrates locomotion in multiple gaits and body shapes, including reconfiguration to squeeze through laterally constrained spaces.
Q3. Who is CLARI built for, and which industries can benefit from it?
CLARI targets research in robotics for applications like search-and-rescue and asset inspection. Potential beneficiaries include disaster response teams and industries requiring access to tight spaces, such as aviation maintenance.
Q4. Is CLARI a commercial product or still a research prototype?
CLARI remains a research prototype developed in the Jayaram Lab at University of Colorado Boulder. It uses tethered connections for power and control, with no commercial release reported.
Q5. Is CLARI currently available for purchase, and when is it expected to ship?
As of 2026, CLARI is not available for purchase. Researchers have outlined plans for future wireless iterations, but no shipping timelines have been announced.
Q6. How does CLARI actually work in real-world environments?
CLARI locomotes using open-loop control at stride frequencies up to 10 Hz across gaits like trot and walk. Preliminary tests show it navigating open terrain and squeezing through gaps via compliant body deformation.
Q7. When was CLARI announced or officially launched?
CLARI was introduced in a study published on August 30, 2023, in Advanced Intelligent Systems. The prototype was developed by a team including Heiko Kabutz and Kaushik Jayaram at University of Colorado Boulder.
Q8. How is CLARI different from other robots in the same category?
Unlike rigid cubic robots, CLARI employs laminate fabrication and origami assembly for passive shape-morphing. Its modular legs enable independent motion, allowing deformation not seen in prior legged designs.
Q9. Does CLARI require additional development or customization after purchase?
As a tethered research prototype, CLARI would need further development for untethered operation and customization. Researchers note its modular design facilitates leg additions, such as for spider-like configurations.
Q10. What is the future roadmap or planned upgrades for CLARI?
Plans include integrating sensors for autonomous obstacle avoidance and balancing flexibility with strength for more legs. The team aims to advance toward wireless versions for complex natural terrains.
User Comments (No Login needed)
Share your thoughts, experiences, or questions about this robot.
Comments are reviewed before posting.